Coloring Between the Lines: Personalization in the Null Space of Planning Constraints
Overview
We propose a method for continual, flexible, active, and safe robot personalization.
Video with Audio
Abstract
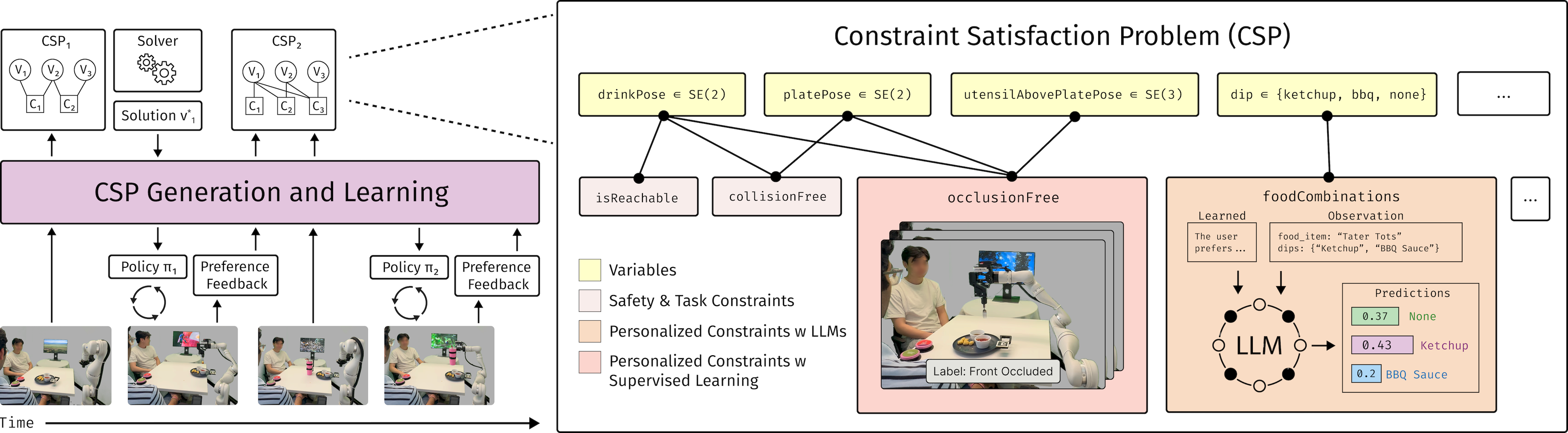
Generalist robots must personalize in-the-wild to meet the diverse needs and preferences of long-term users. How can we enable flexible personalization without sacrificing safety or competency? This paper proposes Coloring Between the Lines (CBTL), a method for personalization that exploits the null space of constraint satisfaction problems (CSPs) used in robot planning. CBTL begins with a CSP generator that ensures safe and competent behavior, then incrementally personalizes behavior by learning parameterized constraints from online interaction. By quantifying uncertainty and leveraging the compositionality of planning constraints, CBTL achieves sample-efficient adaptation without environment resets. We evaluate CBTL in (1) three diverse simulation environments; (2) a web-based user study; and (3) a real-robot assisted feeding system, finding that CBTL consistently achieves more effective personalization with fewer interactions than baselines. Our results demonstrate that CBTL provides a unified and practical approach for continual, flexible, active, and safe robot personalization.
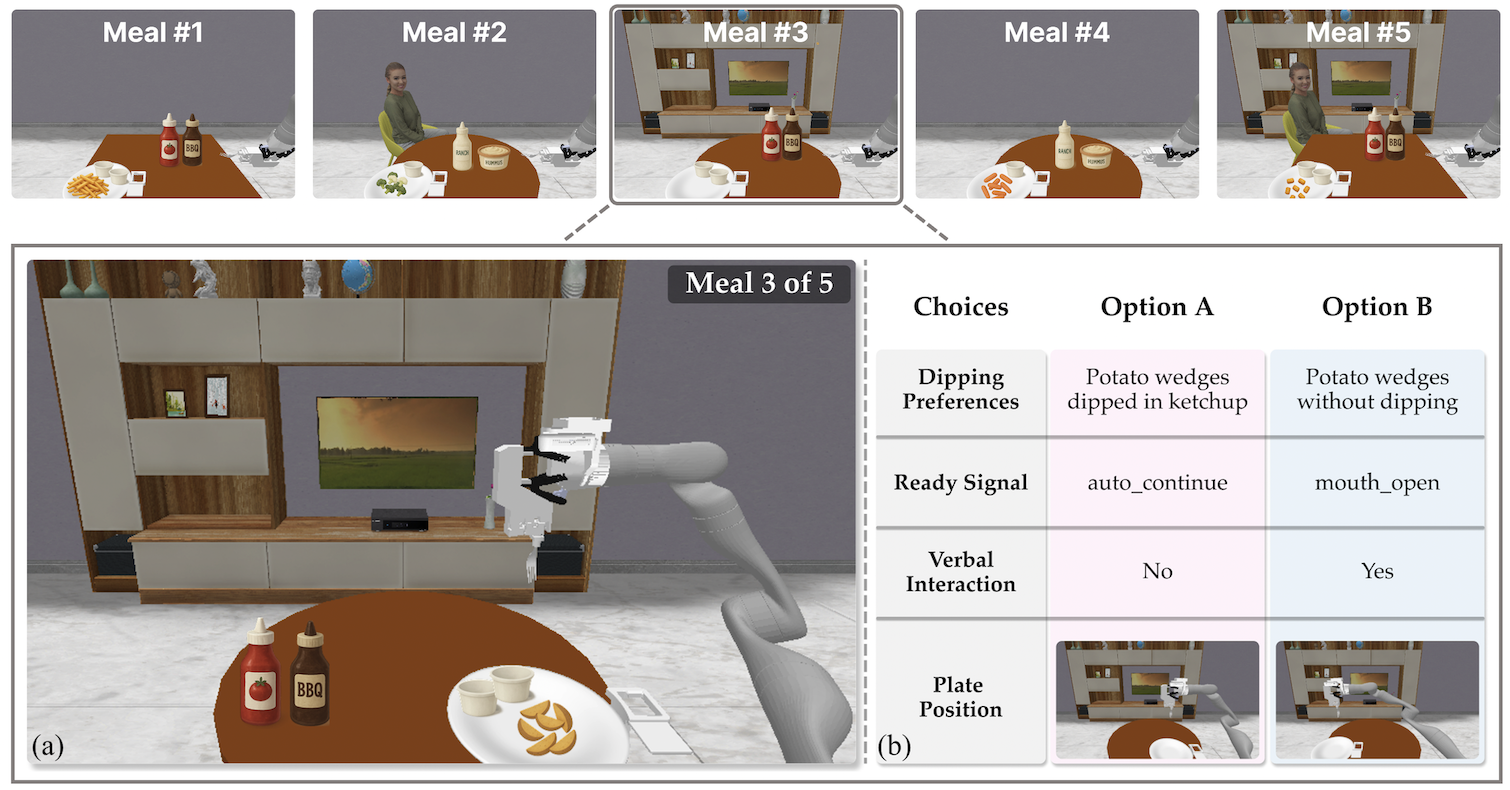
Simulation Environments
Cooking
Cleaning
Books
Simulation Results
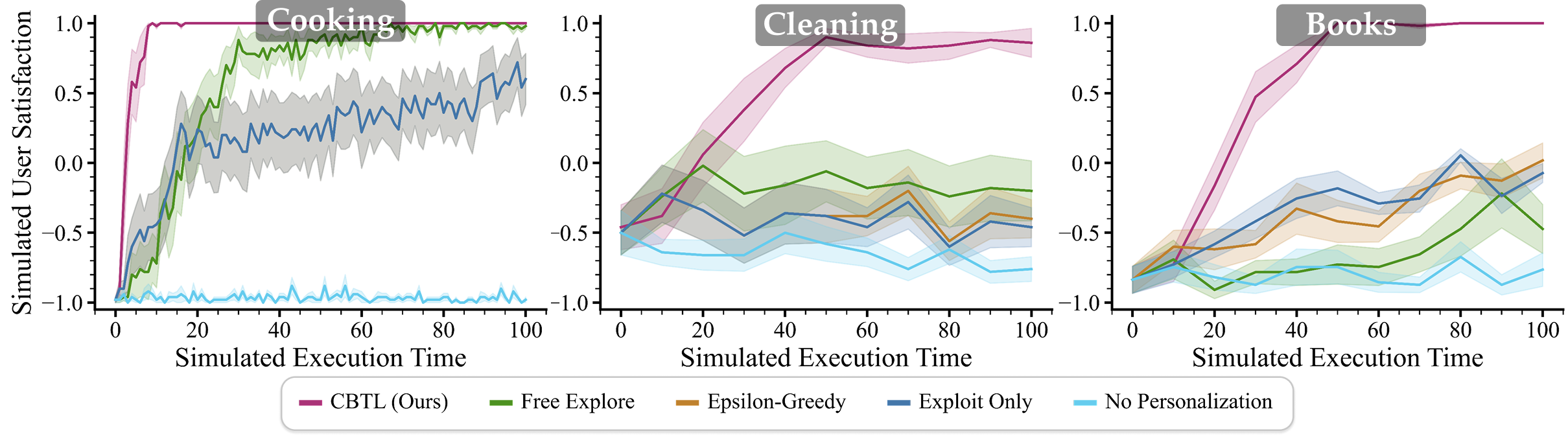
CBTL personalizes better and faster than baselines.
Web Study (60 participants)
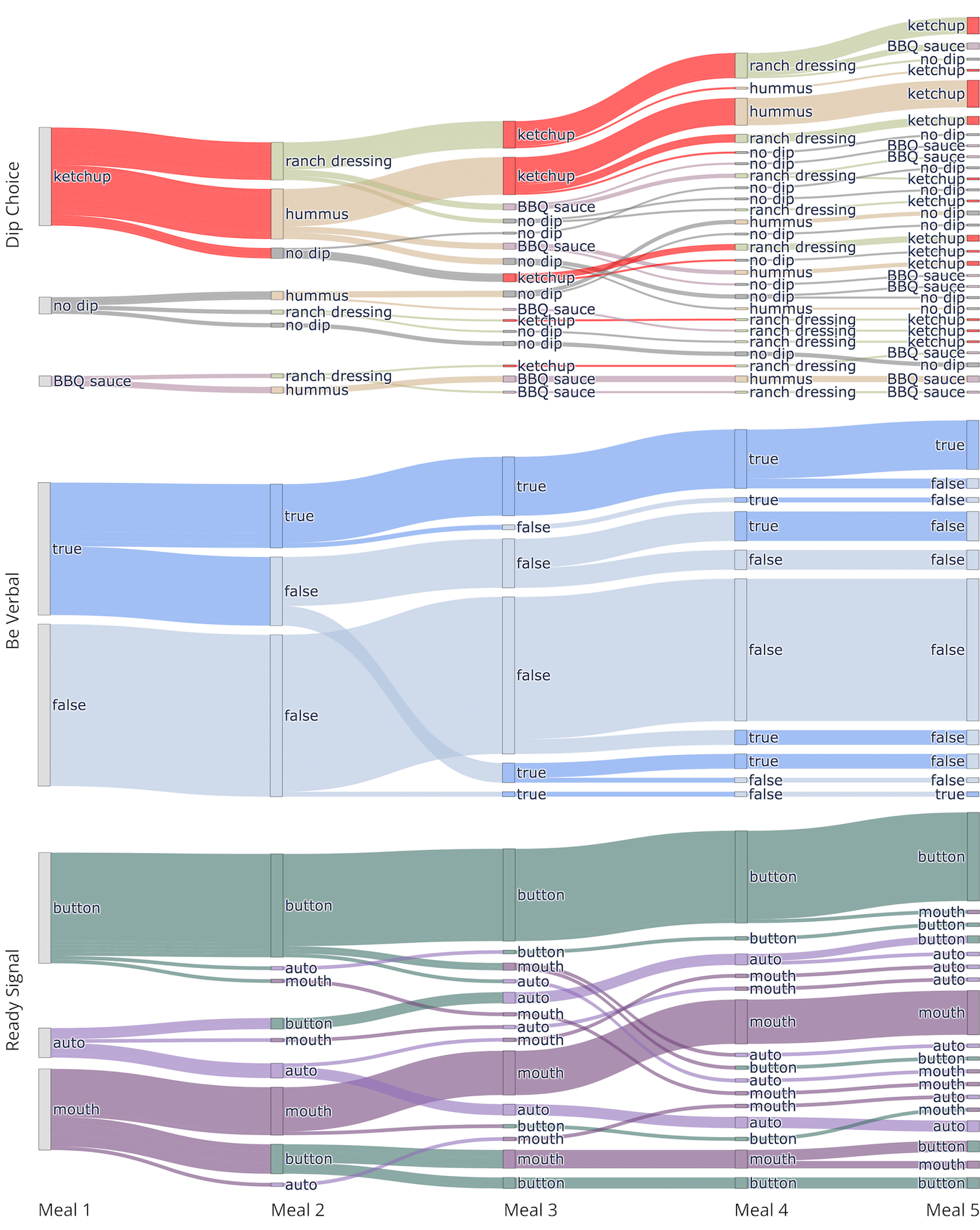
CBTL rapidly learns real human preferences.
Citation
@article{silver2025coloring,
title={Coloring Between the Lines: Personalization in the Null Space of Planning Constraints},
author={Silver, Tom and Jenamani, Rajat Kumar and Liu, Ziang and Dodson, Ben and Bhattacharjee, Tapomayukh},
journal={Under Review},
year={2025}
}