Physical caregiving robots need to assist different users with different tasks in diverse environments, and they come in many embodiments. While substantial progress has been made on individual caregiving tasks, most existing systems remain tightly coupled to specific environments and robot embodiments, and often do not explicitly model or constrain interactions around people, despite humans being special agents in the environment. This motivates a focus on adapting to context that emerges from the joint interaction between the environment and the robot's embodiment.
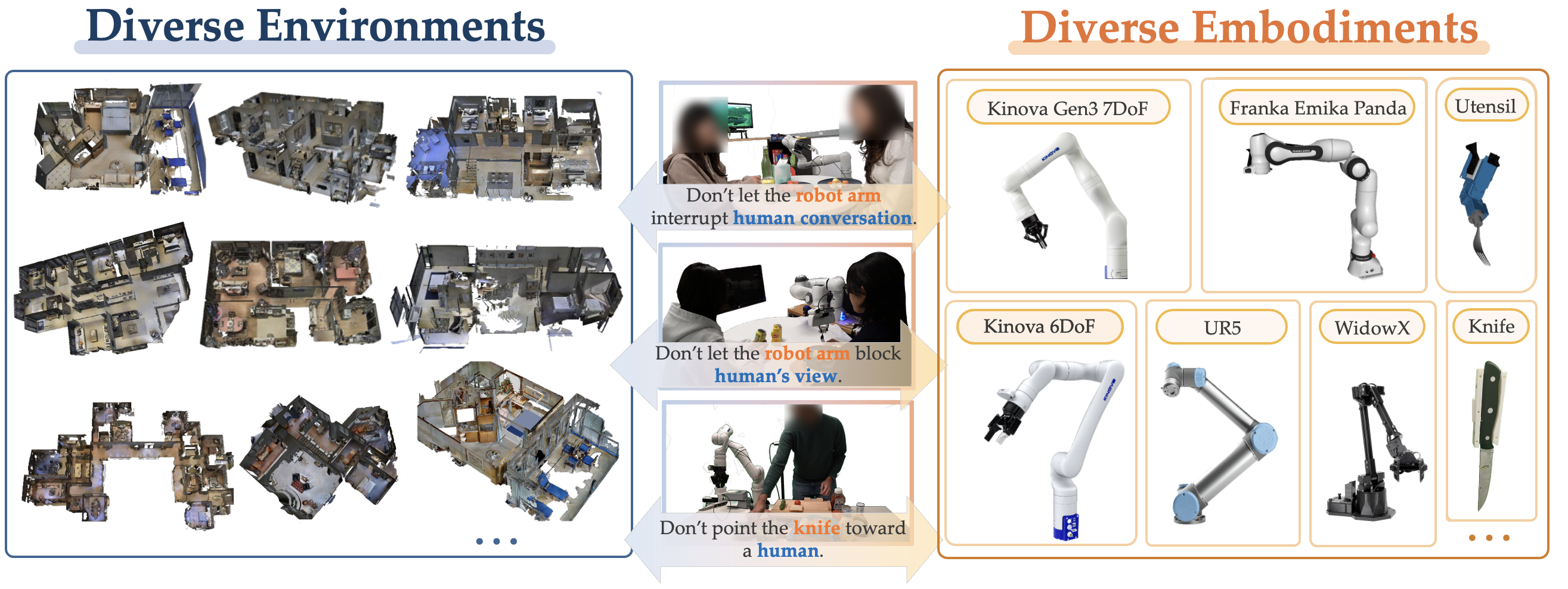
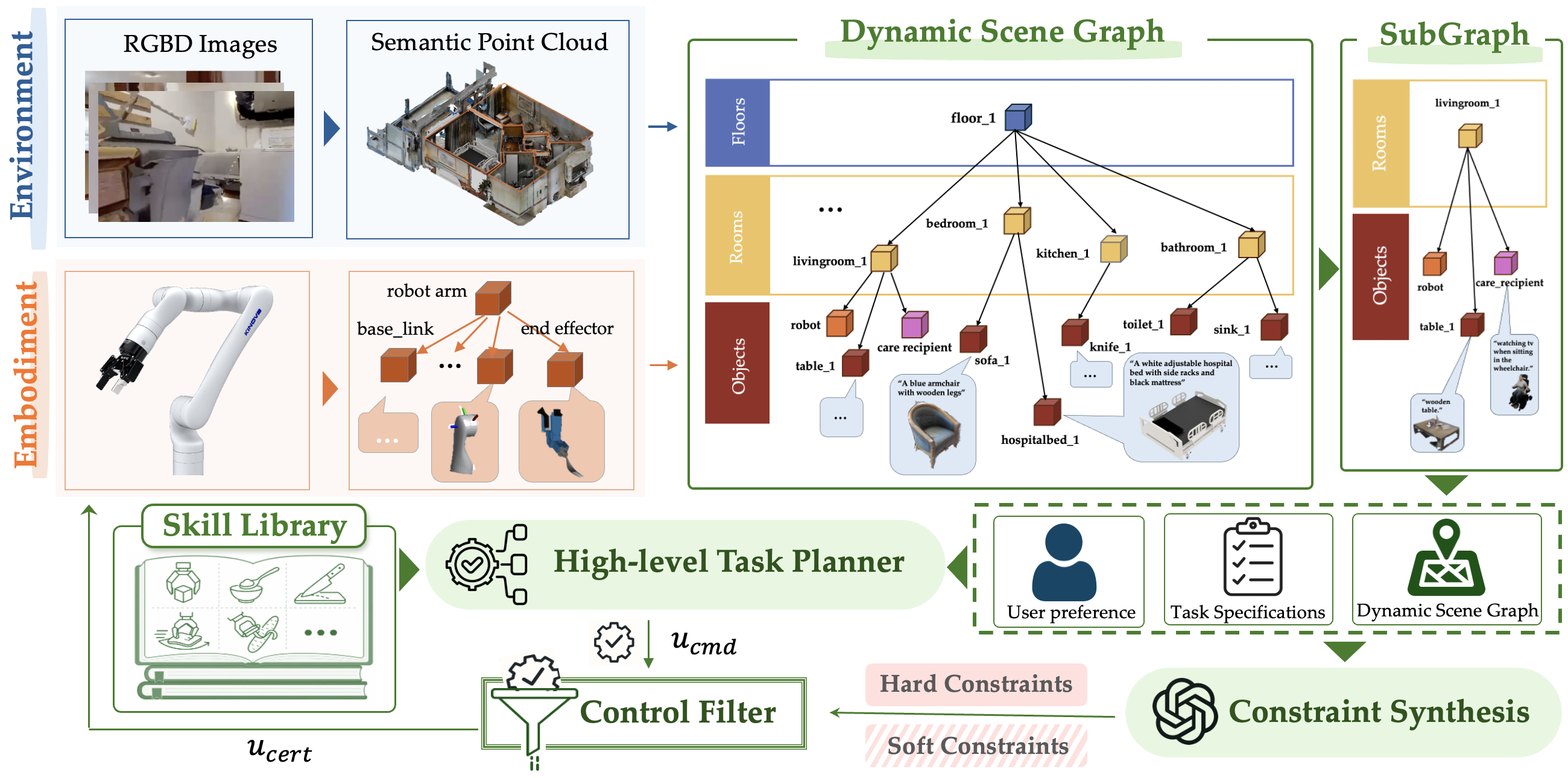
We propose E2CARE, a framework that enables context-aware adaptation by representing primitive caregiving skills as interaction templates whose execution is reshaped online. E2CARE represents the environment, the robot, and the human within a unified 3D dynamic scene graph that models these interaction contexts explicitly, and synthesizes task-specific constraints to govern how each skill is executed. By enforcing these constraints at runtime, the same skill templates can be reused zero-shot and safely across diverse environments and robot embodiments. We evaluate E2CARE across four activities of daily living in hundreds of simulated household environments, including assistive home settings, and across diverse robot embodiments, and validate it through user studies on two caregiving tasks with two robots in various real-world environments. Results demonstrate consistent and successful adaptation across these environments and embodiments.
E2CARE enables context-aware caregiving by modeling the joint interaction between the environment and the robot's embodiment. Primitive skills are represented as reusable interaction templates and reshaped online via task-specific constraints, allowing safe deployment across diverse environments and robot embodiments.
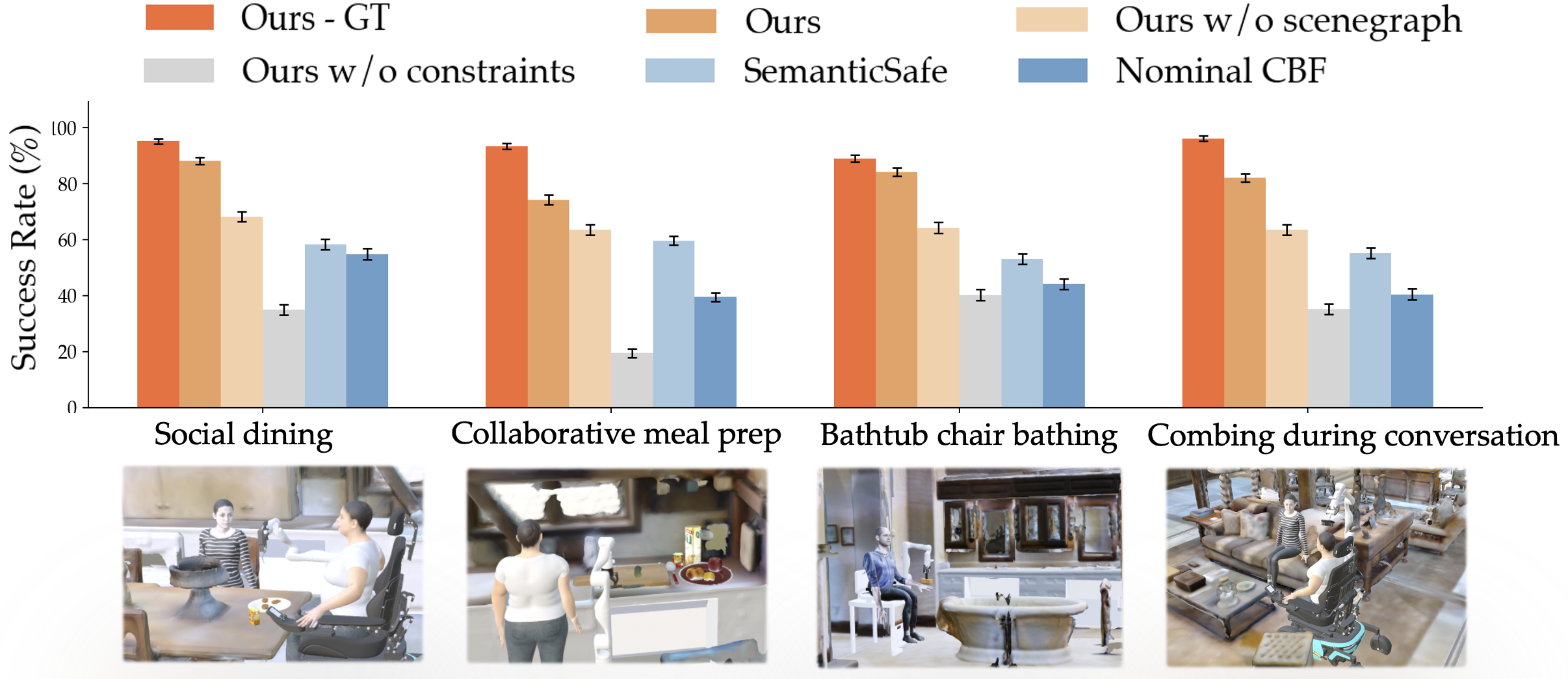
We validate E2CARE We evaluated E2Care in simulation across various environments and robots on four daily tasks.
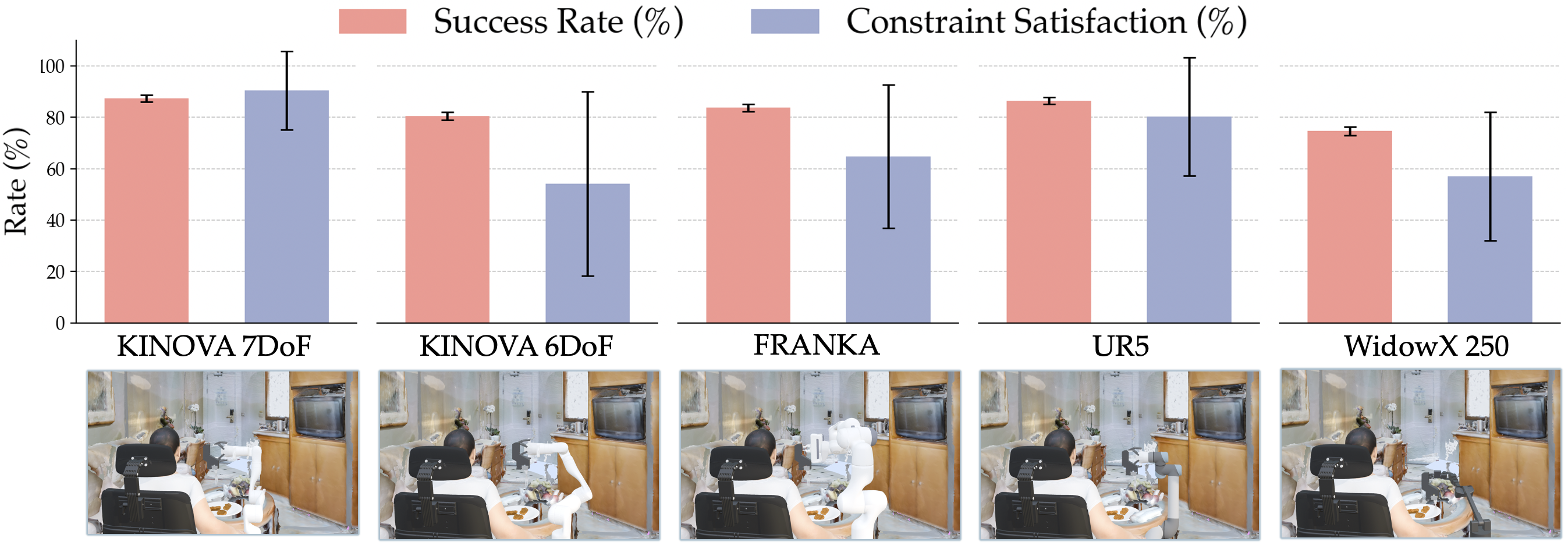
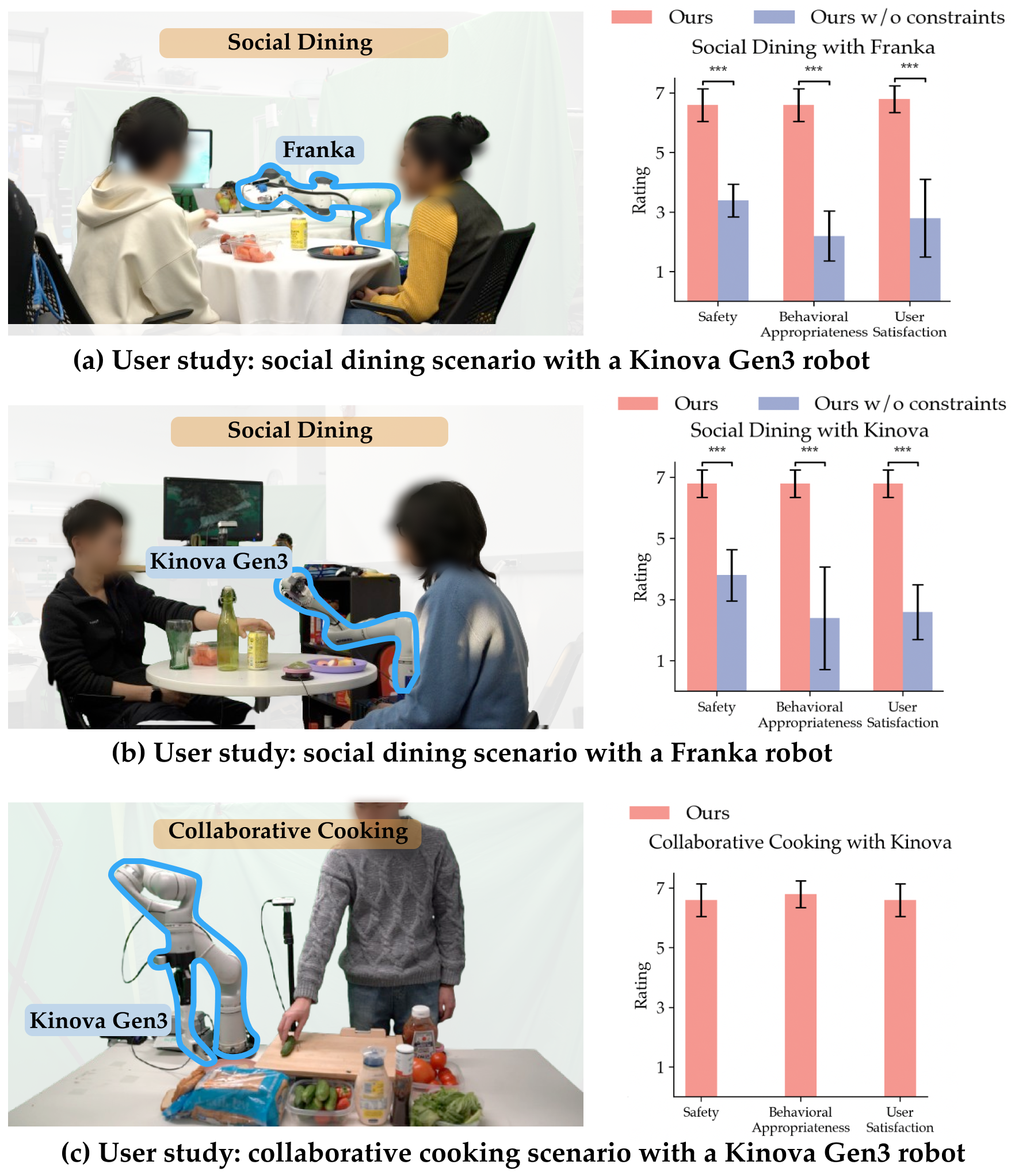
We further validated the system through real-world user studies on social dining and collaborative cooking tasks using Franka and Kinova Gen3 robots. Participants rated safety, behavioral appropriateness, and satisfaction on a 7-point Likert scale. E2CARE substantially outperforms the ablation without constraints across all scenarios.
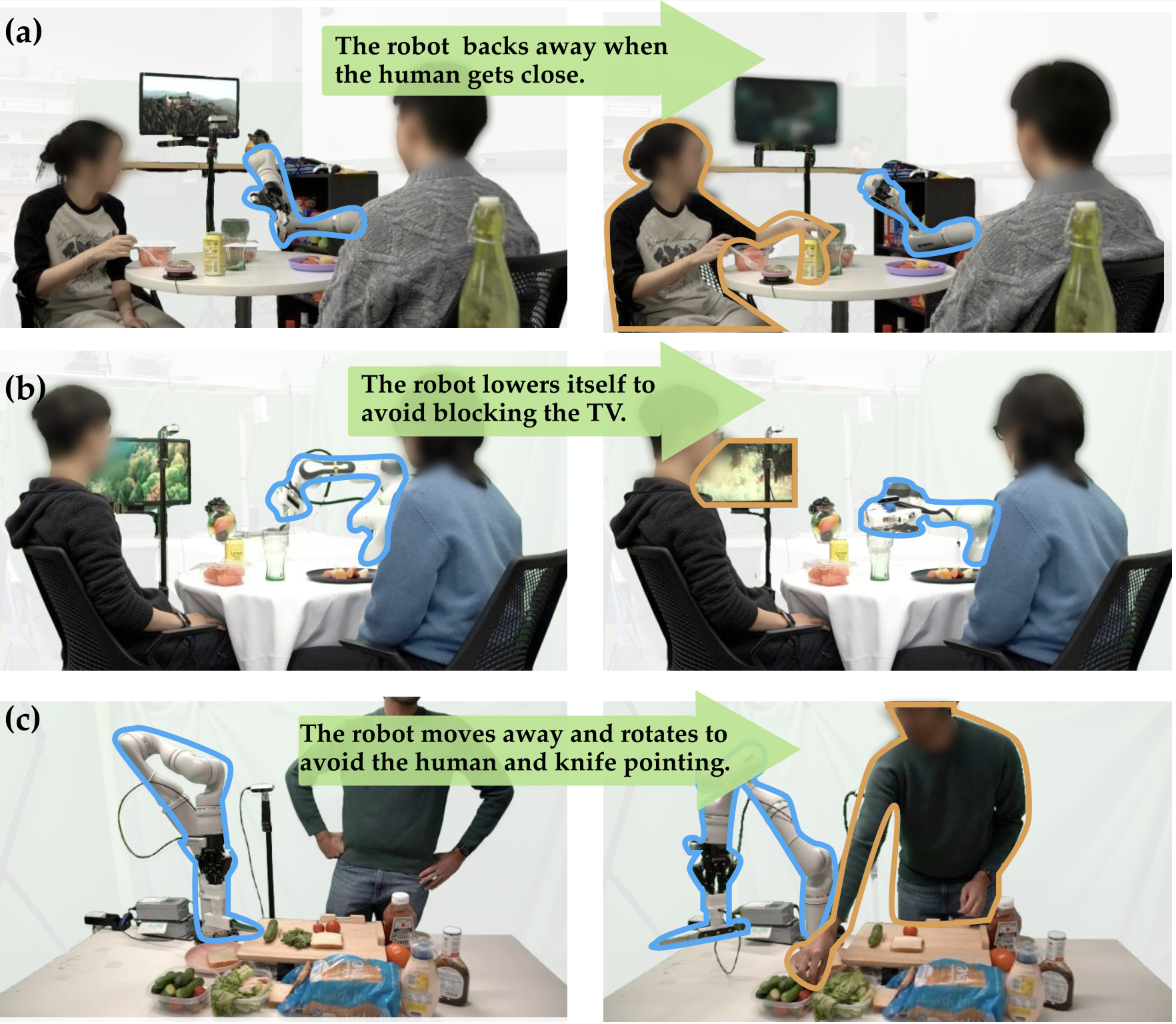
We demonstrate the effectiveness of E2CARE through qualitative examples. In (a), while the robot is feeding a human in a social dining scenario, another person approaches the table to get food, and the robot backs away to maintain a safe distance. In (b), the robot lowers its motion to avoid blocking the user’s view and then moves away to maintain a safe distance when both attempt to reach the same food. In (c), when a human approaches a robot holding a knife, the robot immediately increases the separation distance and rotates the knife blade away for safety. Once the human leaves the workspace, the robot resumes the task.
@inproceedings{wu2026embodiment,
title = {Embodiment Meets Environment: Toward Context-Aware, Safe Physical Caregiving Robots},
author = {Wu, Zhanxin and Tong, Ruofei and Fang, Jiaying and Bhattacharjee, Tapomayukh},
booktitle = {Robotics: Science and Systems (RSS)},
year = {2026}
}