[C/J] Indicates a conference or journal paper.
[O] Indicates other papers and reports.
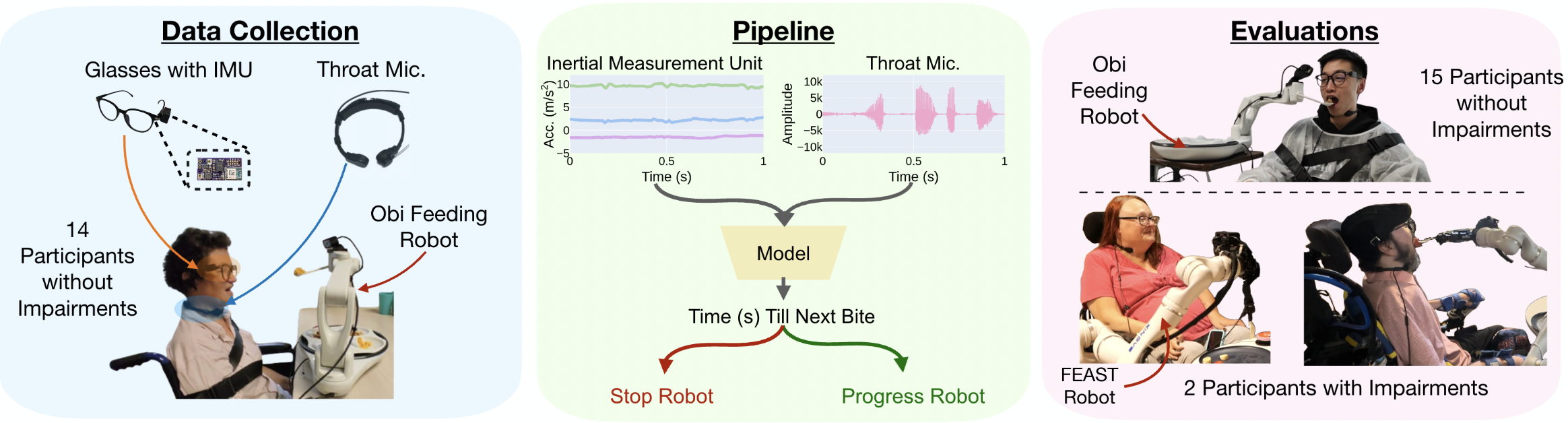
WAFFLE: A Wearable Approach to Bite Timing Estimation in Robot-Assisted Feeding
[C/J]
Akhil Padmanabha, Jessie Yuan, Tanisha Mehta, Rajat Kumar Jenamani, Eric Hu, Victoria de León, Anthony Wertz, Janavi Gupta, Ben Dodson, Yunting Yan, Carmel Majidi, Tapomayukh Bhattacharjee†, Zackory Erickson†
ACM/IEEE International Conference on Human Robot Interaction. 2026
Best Systems Paper Award Winner
Akhil Padmanabha, Jessie Yuan, Tanisha Mehta, Rajat Kumar Jenamani, Eric Hu, Victoria de León, Anthony Wertz, Janavi Gupta, Ben Dodson, Yunting Yan, Carmel Majidi, Tapomayukh Bhattacharjee†, Zackory Erickson†
ACM/IEEE International Conference on Human Robot Interaction. 2026
Best Systems Paper Award Winner
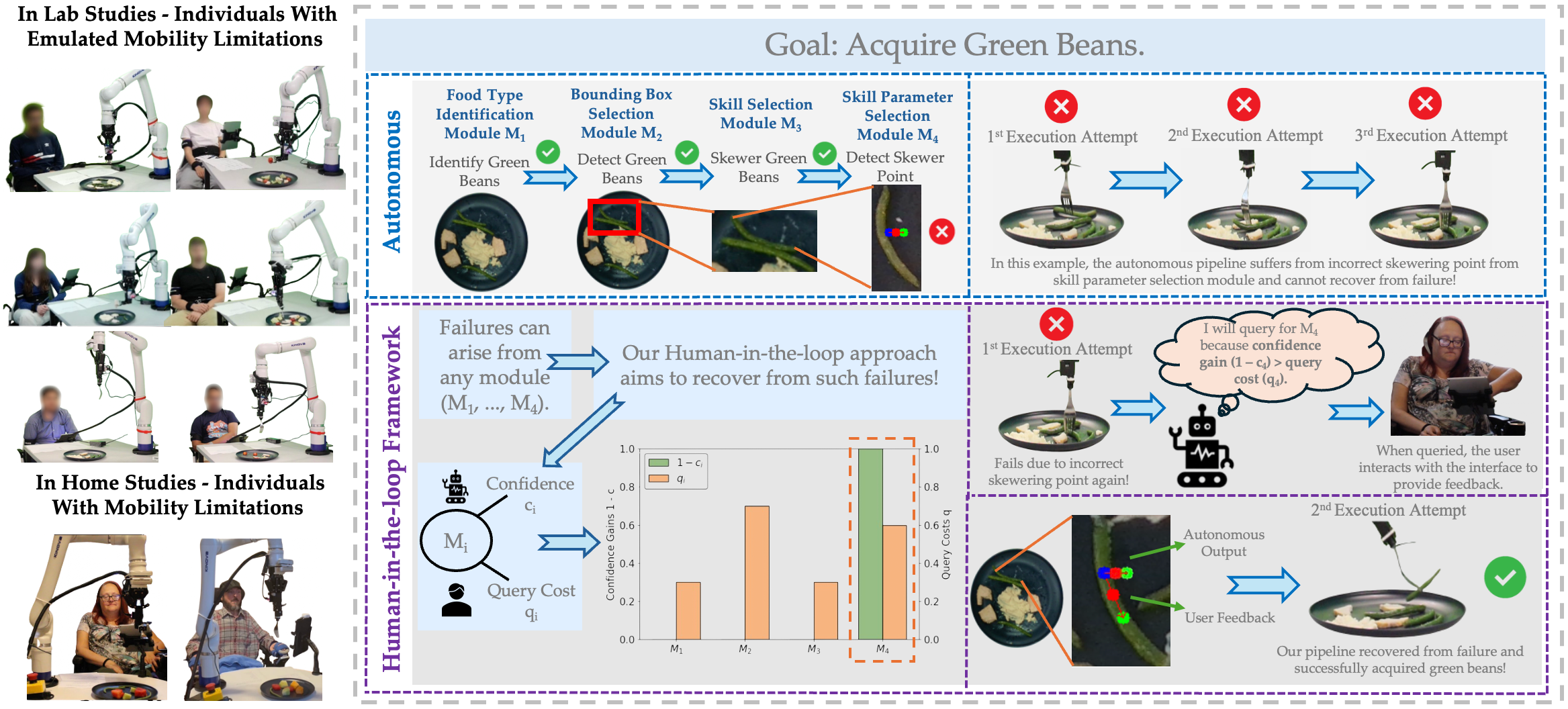
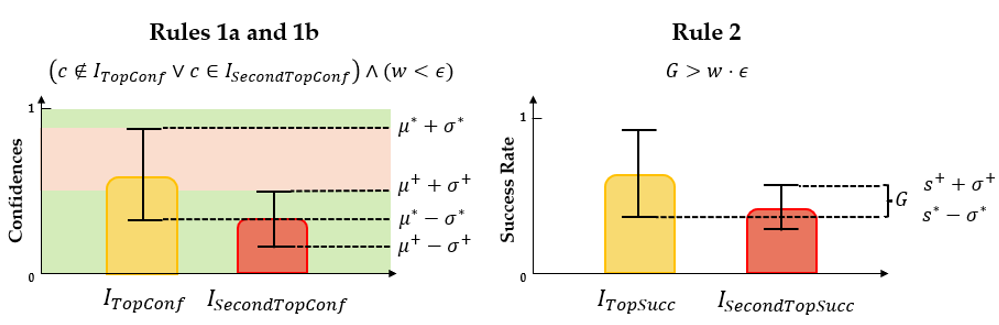
A Human-in-the-Loop Confidence-Aware Failure Recovery Framework for Modular Robot Policies
[C/J]
Rohan Banerjee, Krishna Palempalli*, Bohan Yang*, Jiaying Fang, Alif Abdullah, Tom Silver, Sarah Dean*, Tapomayukh Bhattacharjee*
ACM/IEEE International Conference on Human Robot Interaction. 2026
Rohan Banerjee, Krishna Palempalli*, Bohan Yang*, Jiaying Fang, Alif Abdullah, Tom Silver, Sarah Dean*, Tapomayukh Bhattacharjee*
ACM/IEEE International Conference on Human Robot Interaction. 2026
CareEval: Evaluating Large Language Models for Decision-Making in Physical Robot Caregiving
[O]
Ziang Liu, Katherine Dimitropoulou, Christy Cheung, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human Robot Interaction. 2026
Ziang Liu, Katherine Dimitropoulou, Christy Cheung, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human Robot Interaction. 2026

Kiri-Spoon: A Kirigami Utensil for Robot-Assisted Feeding
[C/J]
Maya Keely, Brandon Franco, Casey Grothoff, Rajat Kumar Jenamani, Tapomayukh Bhattacharjee, Dylan P. Losey, Heramb Nemlekar
International Journal of Robotics Research (IJRR). 2025
Maya Keely, Brandon Franco, Casey Grothoff, Rajat Kumar Jenamani, Tapomayukh Bhattacharjee, Dylan P. Losey, Heramb Nemlekar
International Journal of Robotics Research (IJRR). 2025
SAVOR: Skill Affordance Learning from Visuo-Haptic Perception for Robot-Assisted Bite Acquisition
[C/J]
Zhanxin Wu, Bo Ai, Tom Silver, Tapomayukh Bhattacharjee
Conference on Robot Learning (CoRL). 2025
Zhanxin Wu, Bo Ai, Tom Silver, Tapomayukh Bhattacharjee
Conference on Robot Learning (CoRL). 2025
CLAMP: Crowdsourcing a LArge-scale in-the-wild haptic dataset with an open-source device for Multimodal robot Perception
[C/J]
Pranav N. Thakkar*, Shubhangi Sinha*, Karan Baijal, Yuhan (Anjelica) Bian, Leah Lackey, Ben Dodson, Heisen Kong, Jueun Kwon, Amber Li, Yifei Hu, Alexios Rekoutis, Tom Silver, Tapomayukh Bhattacharjee
Conference on Robot Learning (CoRL). 2025
Pranav N. Thakkar*, Shubhangi Sinha*, Karan Baijal, Yuhan (Anjelica) Bian, Leah Lackey, Ben Dodson, Heisen Kong, Jueun Kwon, Amber Li, Yifei Hu, Alexios Rekoutis, Tom Silver, Tapomayukh Bhattacharjee
Conference on Robot Learning (CoRL). 2025
PrioriTouch: Adapting to User Contact Preferences for Whole-Arm Physical Human-Robot Interaction
[C/J]
Rishabh Madan, Jiawei Lin, Mahika Goel, Angchen Xie, Xiaoyu Liang, Marcus Lee, Justin Guo, Pranav N. Thakkar, Rohan Banerjee, Jose Barreiros, Kate Tsui, Tom Silver, Tapomayukh Bhattacharjee
Conference on Robot Learning (CoRL). 2025
Rishabh Madan, Jiawei Lin, Mahika Goel, Angchen Xie, Xiaoyu Liang, Marcus Lee, Justin Guo, Pranav N. Thakkar, Rohan Banerjee, Jose Barreiros, Kate Tsui, Tom Silver, Tapomayukh Bhattacharjee
Conference on Robot Learning (CoRL). 2025

OpenRoboCare: A Multi-Modal Multi-Task Expert Demonstration Dataset for Robot Caregiving
[C/J]
Xiaoyu Liang, Ziang Liu, Kelvin Lin, Edward Gu, Ruolin Ye, Tam Nguyen, Cynthia Hsu, Zhanxin Wu, Xiaoman Yang, Christy Sum Yu Cheung, Harold Soh, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2025
Xiaoyu Liang, Ziang Liu, Kelvin Lin, Edward Gu, Ruolin Ye, Tam Nguyen, Cynthia Hsu, Zhanxin Wu, Xiaoman Yang, Christy Sum Yu Cheung, Harold Soh, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2025
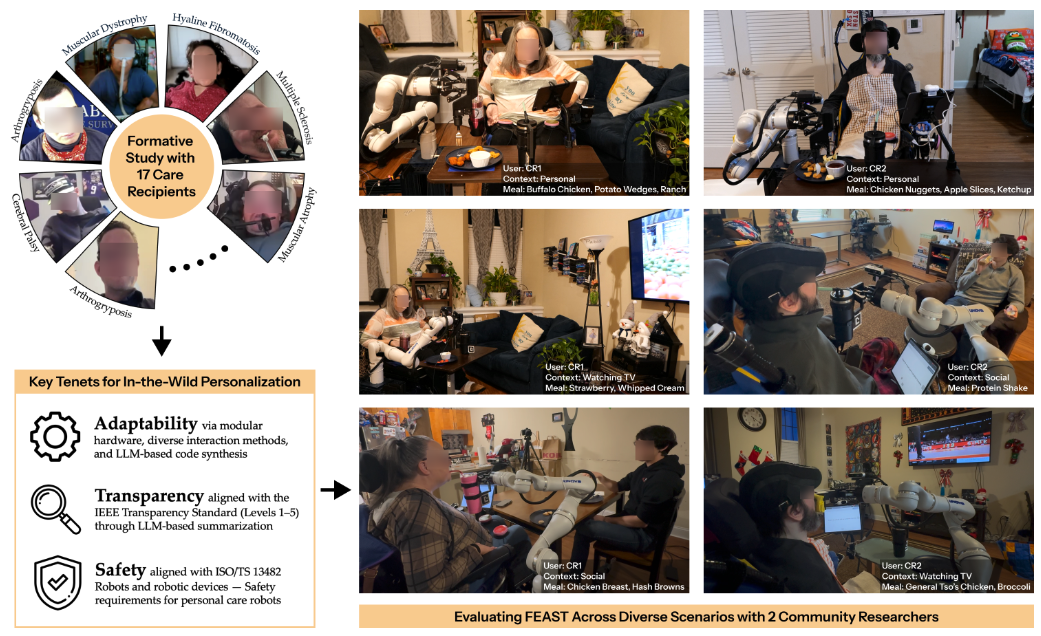
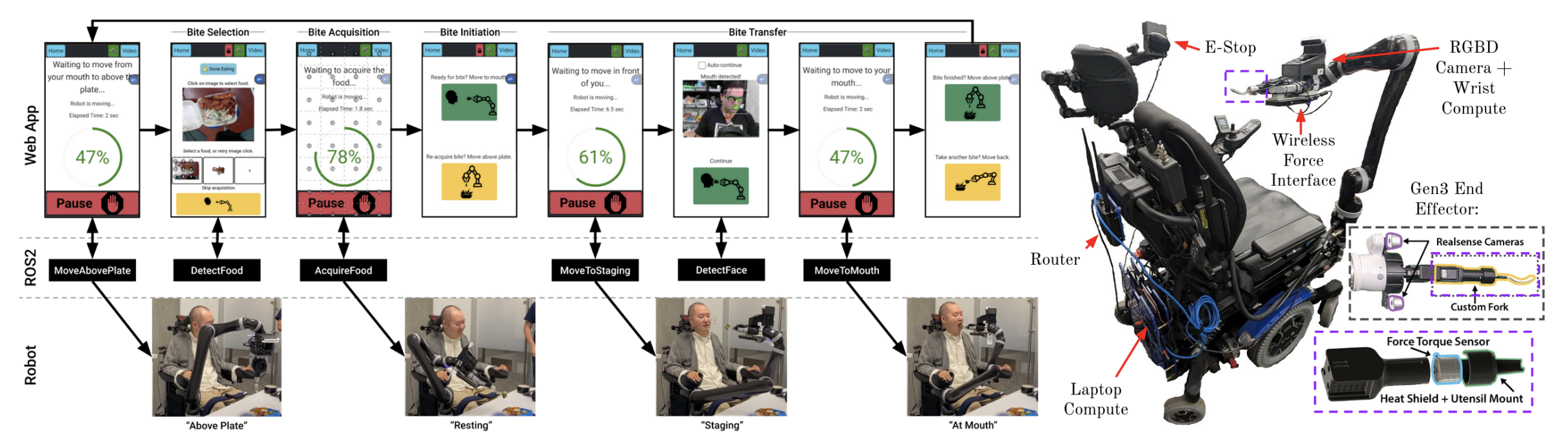
FEAST: A Flexible Mealtime-Assistance System Towards In-the-Wild Personalization
[C/J]
Rajat Kumar Jenamani, Tom Silver, Ben Dodson, Shiqin Tong, Anthony Song, Yuting Yang, Ziang Liu, Benjamin Howe, Aimee Whitneck, Tapomayukh Bhattacharjee
Robotics: Science and Systems. 2025
Best Paper Award Winner, Best Systems Paper Award Finalist
Rajat Kumar Jenamani, Tom Silver, Ben Dodson, Shiqin Tong, Anthony Song, Yuting Yang, Ziang Liu, Benjamin Howe, Aimee Whitneck, Tapomayukh Bhattacharjee
Robotics: Science and Systems. 2025
Best Paper Award Winner, Best Systems Paper Award Finalist
Human-in-the-loop Foundation Model Failure Recovery for Robot-Assisted Bite Acquisition
[O]
Krishna Palempalli, Rohan Banerjee, Sarah Dean, Tapomayukh Bhattacharjee
ICRA Workshop on Safely Leveraging Vision-Language Foundation Models in Robotics. 2025
Krishna Palempalli, Rohan Banerjee, Sarah Dean, Tapomayukh Bhattacharjee
ICRA Workshop on Safely Leveraging Vision-Language Foundation Models in Robotics. 2025
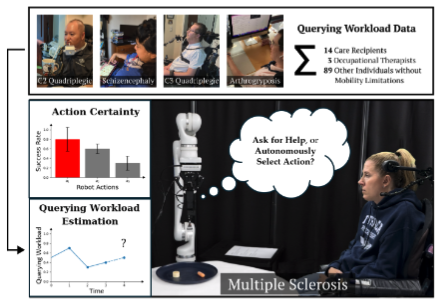
To Ask or Not To Ask: Human-in-the-loop Contextual Bandits with Applications in Robot-Assisted Feeding
[C/J]
Rohan Banerjee, Rajat Kumar Jenamani*, Sidharth Vasudev*, Amal Nanavati, Katherine Dimitropoulou, Sarah Dean†, Tapomayukh Bhattacharjee†
International Conference on Robotics and Automation. 2025
Best Paper Award Finalist
Rohan Banerjee, Rajat Kumar Jenamani*, Sidharth Vasudev*, Amal Nanavati, Katherine Dimitropoulou, Sarah Dean†, Tapomayukh Bhattacharjee†
International Conference on Robotics and Automation. 2025
Best Paper Award Finalist
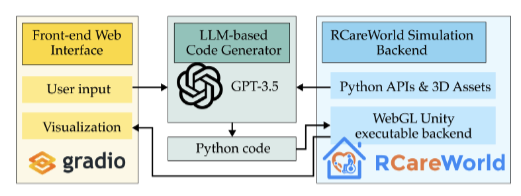
RCareGen: An Interface for Scene and Task Generation in RCareWorld
[O]
Shuaixing Chen, Ruolin Ye, Saurabh Dingwani, Pooyan Fazli, Hasti Seifi, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human Robot Interaction. 2025
Shuaixing Chen, Ruolin Ye, Saurabh Dingwani, Pooyan Fazli, Hasti Seifi, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human Robot Interaction. 2025
GRACE: Generalizing Robot-Assisted Caregiving with User Functionality Embeddings
[C/J]
Ziang Liu, Yuanchen Ju, Yu Da, Tom Silver, Pranav N. Thakkar, Jenna Li, Justin Guo, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human-Robot Interaction. 2025
Ziang Liu, Yuanchen Ju, Yu Da, Tom Silver, Pranav N. Thakkar, Jenna Li, Justin Guo, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human-Robot Interaction. 2025
CART-MPC: Coordinating Assistive Devices for Robot-Assisted Transferring with Multi-Agent Model Predictive Control
[C/J]
Ruolin Ye*, Shuaixing Chen*, Yunting Yan*, Joyce Yang, Christina Ge, Jose Barreiros, Kate Tsui, Tom Silver, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human-Robot Interaction. 2025
Ruolin Ye*, Shuaixing Chen*, Yunting Yan*, Joyce Yang, Christina Ge, Jose Barreiros, Kate Tsui, Tom Silver, Tapomayukh Bhattacharjee
IEEE/ACM International Conference on Human-Robot Interaction. 2025
Enhancing Independence with Physical Caregiving Robots
[O]
Rajat Kumar Jenamani*, Akhil Padmanabha*, Amal Nanavati*, Maya Cakmak†, Zackory Erickson†, Tapomayukh Bhattacherjee†
IEEE/ACM International Conference on Human-Robot Interaction. 2025
[Project Website]
Rajat Kumar Jenamani*, Akhil Padmanabha*, Amal Nanavati*, Maya Cakmak†, Zackory Erickson†, Tapomayukh Bhattacherjee†
IEEE/ACM International Conference on Human-Robot Interaction. 2025
[Project Website]
REPeat: A Real2Sim2Real Approach for Pre-acquisition of Soft Food Items in Robot-assisted Feeding
[C/J]
Nayoung Ha* , Ruolin Ye* , Ziang Liu, Shubhangi Sinha, Tapomayukh Bhattacharjee
IEEE International Conference on Intelligent Robots and Systems. 2024
[Project Website]
Nayoung Ha* , Ruolin Ye* , Ziang Liu, Shubhangi Sinha, Tapomayukh Bhattacharjee
IEEE International Conference on Intelligent Robots and Systems. 2024
[Project Website]

FLAIR: Feeding via Long-Horizon Acquisition of Realistic dishes
[C/J]
Rajat Kumar Jenamani*, Priya Sundaresan*, Maram Sakr, Tapomayukh Bhattacharjee†, Dorsa Sadigh†
Robotics: Science and Systems. 2024
[Project Website]
Rajat Kumar Jenamani*, Priya Sundaresan*, Maram Sakr, Tapomayukh Bhattacharjee†, Dorsa Sadigh†
Robotics: Science and Systems. 2024
[Project Website]

Assistive Applications, Accessibility, and Disability Ethics in HRI
[O]
Katherine H. Allen, Reuben M. Aronson, Tapomayukh Bhattacharjee, Frank Broz, Mai Lee Chang, Maggie Collier, Taylor Kessler Faulkner, Hee Rin Lee, Isabel Neto, Katie Winkle, Elaine Schaertl Short
Companion of the ACM/IEEE International Conference on Human Robot Interaction. 2024
Katherine H. Allen, Reuben M. Aronson, Tapomayukh Bhattacharjee, Frank Broz, Mai Lee Chang, Maggie Collier, Taylor Kessler Faulkner, Hee Rin Lee, Isabel Neto, Katie Winkle, Elaine Schaertl Short
Companion of the ACM/IEEE International Conference on Human Robot Interaction. 2024
An Adaptable, Safe, and Portable Robot-Assisted Feeding System
[O]
Ethan Kroll Gordon*, Rajat Kumar Jenamani*, Amal Nanavati*, Ziang Liu, Haya Bolotski, Raida Karim, Daniel Stabile, Atharva Kashyap, Bernie Hao Zhu, Xilai Dai, Tyler Schrenk, Jonathan Ko, Taylor Kessler Faulkner, Tapomayukh Bhattacharjee, Siddhartha Srinivasa
ACM/IEEE International Conference on Human Robot Interaction. 2024
Best Demonstration Award Winner
Ethan Kroll Gordon*, Rajat Kumar Jenamani*, Amal Nanavati*, Ziang Liu, Haya Bolotski, Raida Karim, Daniel Stabile, Atharva Kashyap, Bernie Hao Zhu, Xilai Dai, Tyler Schrenk, Jonathan Ko, Taylor Kessler Faulkner, Tapomayukh Bhattacharjee, Siddhartha Srinivasa
ACM/IEEE International Conference on Human Robot Interaction. 2024
Best Demonstration Award Winner
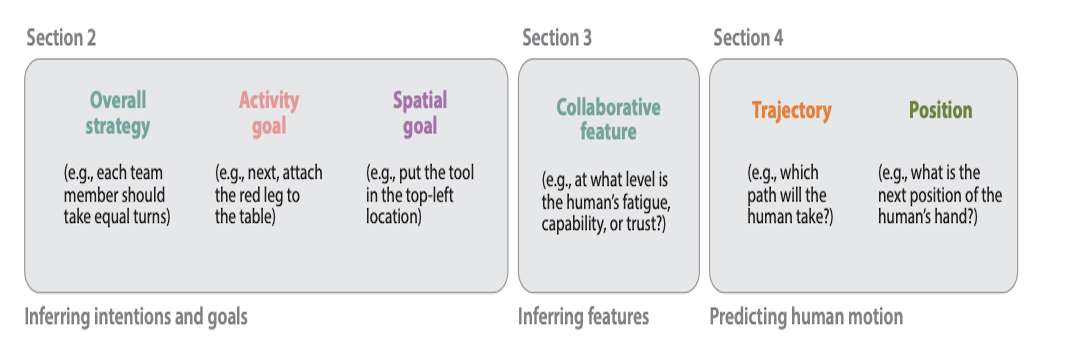
Inferring Human Intent and Predicting Human Action in Human–Robot Collaboration
[C/J]
Guy Hoffman, Tapomayukh Bhattacharjee, and Stefanos Nikolaidis
Annual Review of Control, Robotics, and Autonomous Systems. 2024
Guy Hoffman, Tapomayukh Bhattacharjee, and Stefanos Nikolaidis
Annual Review of Control, Robotics, and Autonomous Systems. 2024
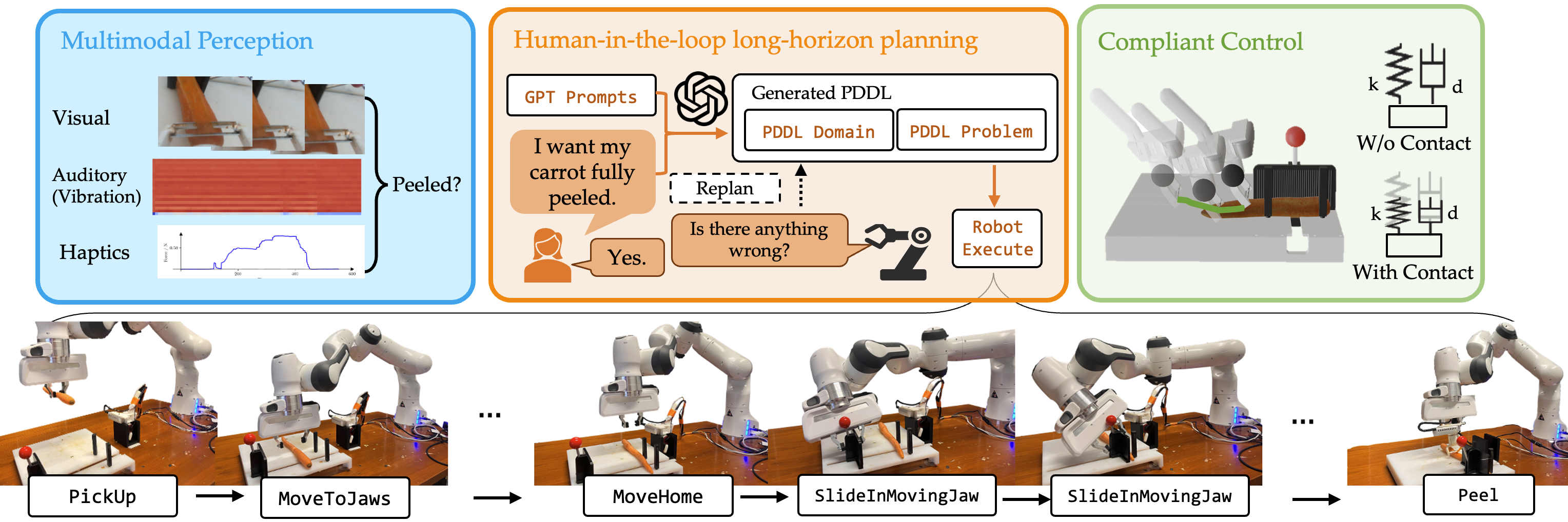
MORPHeus: a Multimodal One-armed Robot-assisted Peeling system with Human Users in-the-loop
[C/J]
Ruolin Ye, Yifei Hu, Yuhan Bian, Luke Kulm, Tapomayukh Bhattacharjee
International Conference on Robotics and Automation. 2024
[Project Website]
Ruolin Ye, Yifei Hu, Yuhan Bian, Luke Kulm, Tapomayukh Bhattacharjee
International Conference on Robotics and Automation. 2024
[Project Website]
CushSense: Soft, Stretchable, and Comfortable Tactile Sensing Skin for Physical Human-Robot Interaction
[C/J]
Boxin Xu, Luoyan Zhong, Grace Zhang, Xiaoyu Liang, Diego Virtue, Rishabh Madan, and Tapo Bhattacharjee
International Conference on Robotics and Automation. 2024
[Project Website]
Boxin Xu, Luoyan Zhong, Grace Zhang, Xiaoyu Liang, Diego Virtue, Rishabh Madan, and Tapo Bhattacharjee
International Conference on Robotics and Automation. 2024
[Project Website]

Robot-assisted Inside-mouth Bite Transfer using Robust Mouth Perception and Physical Interaction-Aware Control
[C/J]
Rajat Jenamani, Daniel Stabile, Ziang Liu, Abrar Anwar, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
ACM/IEEE International Conference on Human Robot Interaction. 2024
Best Paper Award Nomination
[Project Website]
Rajat Jenamani, Daniel Stabile, Ziang Liu, Abrar Anwar, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
ACM/IEEE International Conference on Human Robot Interaction. 2024
Best Paper Award Nomination
[Project Website]

RABBIT: A Robot-Assisted Bed Bathing System with Multimodal Perception and Integrated Compliance
[C/J]
Rishabh Madan, Skyler Valdez, David Kim, Sujie Fang, Luoyan Zhong, Diego Virtue, Tapomayukh Bhattacharjee
ACM/IEEE International Conference on Human Robot Interaction. 2024
[Project Website]
Rishabh Madan, Skyler Valdez, David Kim, Sujie Fang, Luoyan Zhong, Diego Virtue, Tapomayukh Bhattacharjee
ACM/IEEE International Conference on Human Robot Interaction. 2024
[Project Website]
To Ask or Not To Ask: Robot-assisted Bite Acquisition with Human-in-the-loop Contextual Bandits
[O]
Rohan Banerjee, Sarah Dean, Tapomayukh Bhattacharjee
First Workshop on Out-of-Distribution Generalization in Robotics at CoRL 2023. 2023
Rohan Banerjee, Sarah Dean, Tapomayukh Bhattacharjee
First Workshop on Out-of-Distribution Generalization in Robotics at CoRL 2023. 2023

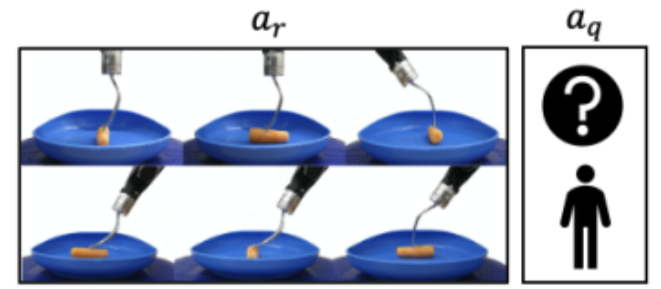
Human-Robot Commensality: Bite Timing Prediction for Robot-Assisted Feeding in Groups
[C/J]
Jan Ondras*, Abrar Anwar*, Tong Wu*, Fanjun Bu, Malte Jung, Jorge Jose Ortiz, Tapomayukh Bhattacharjee
2022 Conference on Robot Learning. 2022
[Project Website]
Jan Ondras*, Abrar Anwar*, Tong Wu*, Fanjun Bu, Malte Jung, Jorge Jose Ortiz, Tapomayukh Bhattacharjee
2022 Conference on Robot Learning. 2022
[Project Website]

Evaluating Human-in-the-loop Assistive Feeding Robots under Different Levels of Autonomy with VR Simulation and Physiological Sensors
[C/J]
Tong Xu, Tianlin Zhao, Jesus G. Cruz-Garza, Tapomayukh Bhattacharjee, and Saleh Kalantari
14th International Conference on Social Robotics. 2022
Tong Xu, Tianlin Zhao, Jesus G. Cruz-Garza, Tapomayukh Bhattacharjee, and Saleh Kalantari
14th International Conference on Social Robotics. 2022
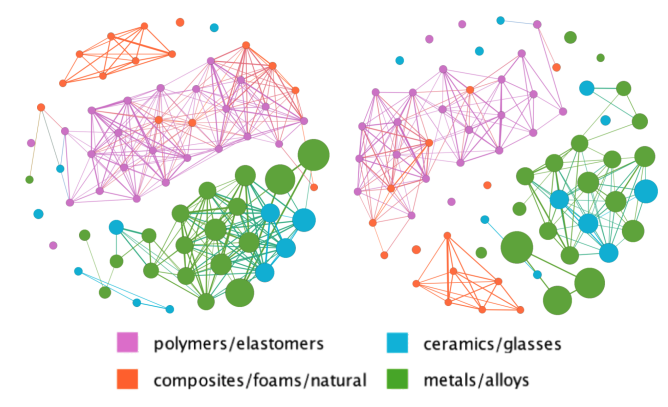
Analyzing Material Recognition Performance of Thermal Tactile Sensing using a Large Materials Database and a Real Robot
[C/J]
Haoping Bai, Haofeng Chen, Elizabeth Healy, Charles C. Kemp, Tapomayukh Bhattacharjee
2022 IEEE International Conference on Robotics and Biomimetics. 2022
Haoping Bai, Haofeng Chen, Elizabeth Healy, Charles C. Kemp, Tapomayukh Bhattacharjee
2022 IEEE International Conference on Robotics and Biomimetics. 2022
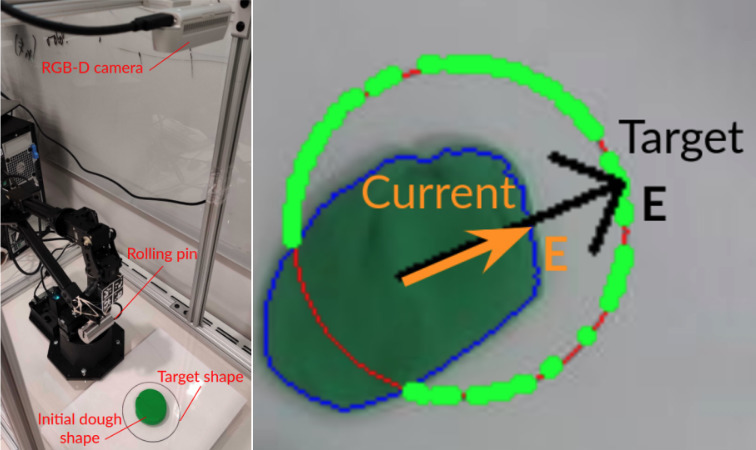
Robotic Dough Shaping
[C/J]
Jan Ondras, Di Ni, Xi Deng, Zeqi Gu, Henry Zheng, and Tapomayukh Bhattacharjee
The 22nd International Conference on Control, Automation and Systems. 2022
Jan Ondras, Di Ni, Xi Deng, Zeqi Gu, Henry Zheng, and Tapomayukh Bhattacharjee
The 22nd International Conference on Control, Automation and Systems. 2022
RCareWorld: A Human-centric Simulation World for Caregiving Robots
[C/J]
Ruolin Ye*, Wenqiang Xu*, Haoyuan Fu, Rajat Kumar Jenamani, Vy Nguyen, Cewu Lu, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE International Conference on Intelligent Robots and Systems. 2022
Best RoboCup Paper Award Winner, ABB Best Student Paper Award Finalist, and Best Paper Award Finalist
[Project Website]
Ruolin Ye*, Wenqiang Xu*, Haoyuan Fu, Rajat Kumar Jenamani, Vy Nguyen, Cewu Lu, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE International Conference on Intelligent Robots and Systems. 2022
Best RoboCup Paper Award Winner, ABB Best Student Paper Award Finalist, and Best Paper Award Finalist
[Project Website]
SPARCS: Structuring Physically Assistive Robotics for Caregiving with Stakeholders-in-the-loop
[C/J]
Rishabh Madan*, Rajat Kumar Jenamani*, Vy Thuy Nguyen, Ahmed Moustafa, Xuefeng Hu, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE International Conference on Intelligent Robots and Systems. 2022
[Project Website]
Rishabh Madan*, Rajat Kumar Jenamani*, Vy Thuy Nguyen, Ahmed Moustafa, Xuefeng Hu, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
IEEE International Conference on Intelligent Robots and Systems. 2022
[Project Website]
Learning from Demonstration using a Curvature Regularized Variational Auto-Encoder (CurvVAE)
[C/J]
Travers Rhodes*, Tapomayukh Bhattacharjee, Daniel Lee
IEEE International Conference on Intelligent Robots and Systems. 2022
Travers Rhodes*, Tapomayukh Bhattacharjee, Daniel Lee
IEEE International Conference on Intelligent Robots and Systems. 2022

Democratizing Robotic Caregiving
[O]
Rajat Kumar Jenamani, Rishabh Madan, Ruolin Ye, Wenqiang Xu, Haoyuan Fu, Vy Thuy Nguyen, Ahmed Moustafa, Xuefeng Hu, Cewu Lu, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
2022 Northeast Robotics Colloquium. 2022
Rajat Kumar Jenamani, Rishabh Madan, Ruolin Ye, Wenqiang Xu, Haoyuan Fu, Vy Thuy Nguyen, Ahmed Moustafa, Xuefeng Hu, Cewu Lu, Katherine Dimitropoulou, Tapomayukh Bhattacharjee
2022 Northeast Robotics Colloquium. 2022

Human-Robot Commensality: Bite Timing Prediction for Robot-Assisted Feeding in Groups
[O]
Jan Ondras, Abrar Anwar, Tong Wu, Fanjun Bu, Malte Jung, Jorge Jose Ortiz, Tapomayukh Bhattacharjee
2022 SoCal Robotics Symposium. 2022
Jan Ondras, Abrar Anwar, Tong Wu, Fanjun Bu, Malte Jung, Jorge Jose Ortiz, Tapomayukh Bhattacharjee
2022 SoCal Robotics Symposium. 2022
Balancing Efficiency and Comfort in Robot-Assisted Bite Transfer
[C/J]
Suneel Belkhale, Ethan Kroll Gordon, Yuxiao Chen, Siddhartha Srinivasa, Tapomayukh Bhattacharjee, Dorsa Sadigh
IEEE International Conference on Robotics and Automation. 2022
[Project Website]
Suneel Belkhale, Ethan Kroll Gordon, Yuxiao Chen, Siddhartha Srinivasa, Tapomayukh Bhattacharjee, Dorsa Sadigh
IEEE International Conference on Robotics and Automation. 2022
[Project Website]
Benchmarking Structured Policies and Policy Optimization for Real-World Dexterous Object Manipulation
[C/J]
Niklas Funk, Charles Schaff, Rishabh Madan, Takuma Yoneda, Julen Urain De Jesus, Joe Watson, Ethan K. Gordon, Felix Widmaier, Stefan Bauer, Siddhartha S. Srinivasa, Tapomayukh Bhattacharjee, Matthew R. Walter, and Jan Peters
IEEE Robotics and Automation Letters. 2022
Niklas Funk, Charles Schaff, Rishabh Madan, Takuma Yoneda, Julen Urain De Jesus, Joe Watson, Ethan K. Gordon, Felix Widmaier, Stefan Bauer, Siddhartha S. Srinivasa, Tapomayukh Bhattacharjee, Matthew R. Walter, and Jan Peters
IEEE Robotics and Automation Letters. 2022

An exploration of accessible remote teleoperation for assistive mobile manipulators in the home
[C/J]
Maria E. Cabrera, Tapomayukh Bhattacharjee, Kavi Dey, and Maya Cakmak.
IEEE International Symposium on Robot and Human Interactive Communication. 2021
Maria E. Cabrera, Tapomayukh Bhattacharjee, Kavi Dey, and Maya Cakmak.
IEEE International Symposium on Robot and Human Interactive Communication. 2021
Cursor-based robot tele-manipulation through 2D-to-SE2 interfaces
[C/J]
Maria E. Cabrera, Kavi Dey, Kavita Krishnaswamy, Tapomayukh Bhattacharjee, and Maya Cakmak
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2021
Maria E. Cabrera, Kavi Dey, Kavita Krishnaswamy, Tapomayukh Bhattacharjee, and Maya Cakmak
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2021
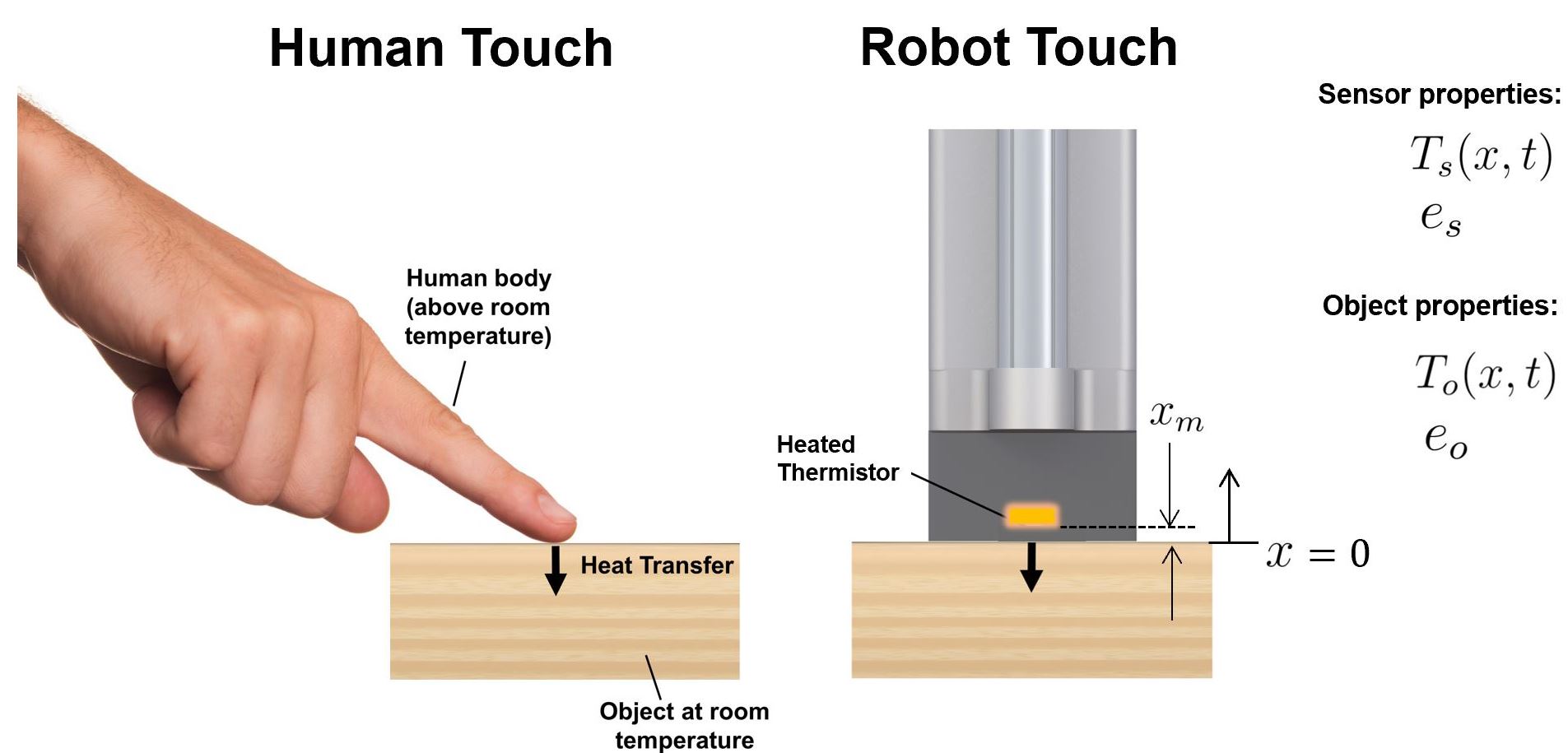
Material recognition via heat transfer given ambiguous initial conditions
[C/J]
Tapomayukh Bhattacharjee, Henry M Clever, Joshua Wade, and Charles C Kemp
IEEE Transactions on Haptics. 2021
Tapomayukh Bhattacharjee, Henry M Clever, Joshua Wade, and Charles C Kemp
IEEE Transactions on Haptics. 2021
Grasping with Chopsticks: Combating Covariate Shift in Model-free Imitation Learning for Fine Manipulation
[C/J]
L. Ke, J. Wang, T. Bhattacharjee, B. Boots, and S. S. Srinivasa
IEEE International Conference on Robotics and Automation. 2021
L. Ke, J. Wang, T. Bhattacharjee, B. Boots, and S. S. Srinivasa
IEEE International Conference on Robotics and Automation. 2021
Leveraging Post hoc Context for Faster Learning in Bandit Settings with Applications in Robot-assisted Feeding
[C/J]
E.K. Gordon, S. Roychowdhury, T. Bhattacharjee, K. Jamieson, and S. S. Srinivasa
IEEE International Conference on Robotics and Automation. 2021
E.K. Gordon, S. Roychowdhury, T. Bhattacharjee, K. Jamieson, and S. S. Srinivasa
IEEE International Conference on Robotics and Automation. 2021
Telemanipulation with Chopsticks: Analyzing Human Factors in User Demonstrations
[C/J]
L. Ke, A. Kamat, J. Wang, T. Bhattacharjee, C. Mavrogiannis, and S. S. Srinivasa
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2020
L. Ke, A. Kamat, J. Wang, T. Bhattacharjee, C. Mavrogiannis, and S. S. Srinivasa
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2020
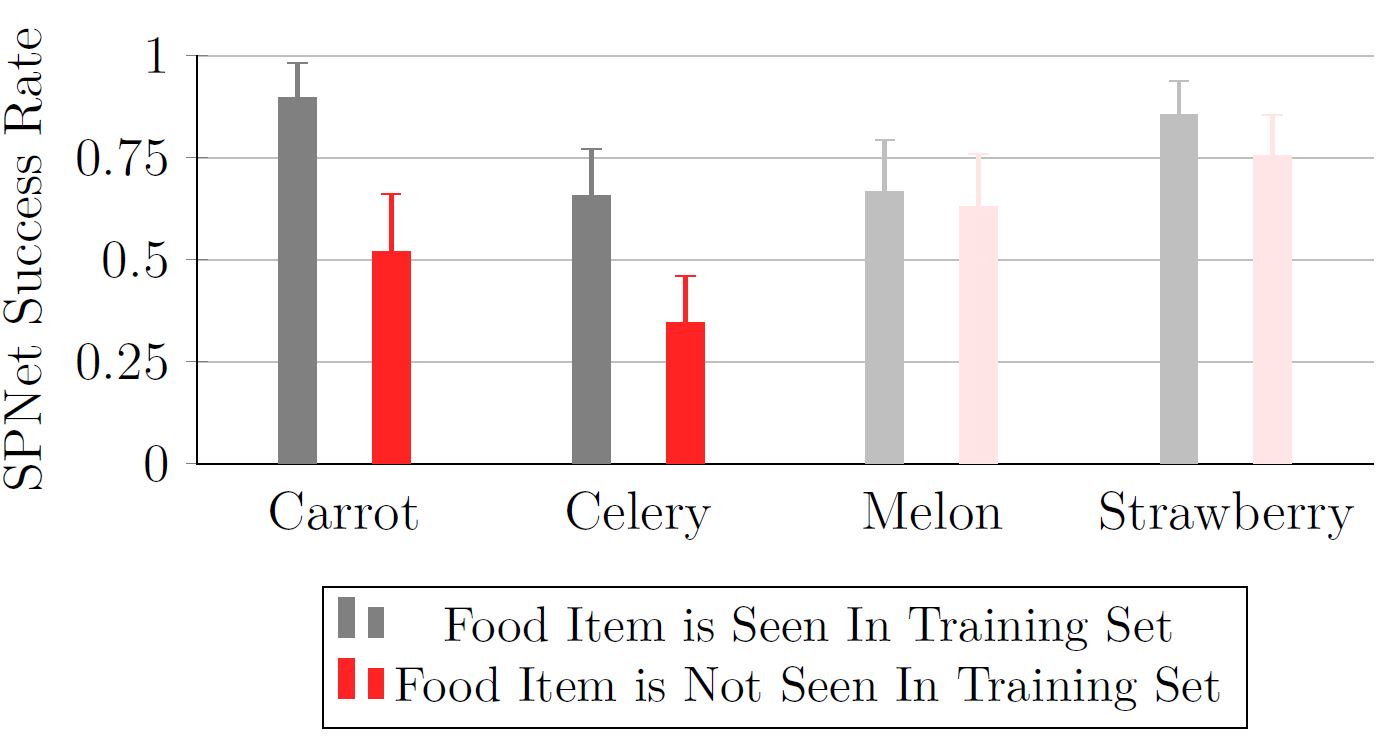
Adaptive Robot-Assisted Feeding: An Online Learning Framework for Acquiring Previously-Unseen Food Items
[C/J]
E.K. Gordon, X. Meng, T. Bhattacharjee, M. Barnes, and S. S. Srinivasa
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2020
E.K. Gordon, X. Meng, T. Bhattacharjee, M. Barnes, and S. S. Srinivasa
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2020
Is More Autonomy Always Better? Exploring Preferences of Users with Mobility Impairments in Robot-assisted Feeding
[C/J]
T. Bhattacharjee, E.K. Gordon, R. Scalise, M.E. Cabrera, A. Caspi, M. Cakmak, and S.S. Srinivasa
ACM/IEEE International Conference on Human-Robot Interaction. 2020
T. Bhattacharjee, E.K. Gordon, R. Scalise, M.E. Cabrera, A. Caspi, M. Cakmak, and S.S. Srinivasa
ACM/IEEE International Conference on Human-Robot Interaction. 2020
Grasping with Chopsticks: Fine Grained Manipulation using Inexpensive Hardware by Imitation Learning
[O]
L. Ke, J. Wang, T. Bhattacharjee, B. Boots, and S. S. Srinivasa
Workshop on Hand-Object Interaction - From Human Demonstrations to Robot Manipulation (HOBI 2020), IEEE International Conference on Robot and Human Interactive Communication. 2020
L. Ke, J. Wang, T. Bhattacharjee, B. Boots, and S. S. Srinivasa
Workshop on Hand-Object Interaction - From Human Demonstrations to Robot Manipulation (HOBI 2020), IEEE International Conference on Robot and Human Interactive Communication. 2020
A Community-Centered Design Framework for Robot-Assisted Feeding Systems
[C/J]
T. Bhattacharjee, M. E. Cabrera, A. Caspi, M. Cakmak, and S.S. Srinivasa
International ACM SIGACCESS Conference on Computers and Accessibility. 2019
T. Bhattacharjee, M. E. Cabrera, A. Caspi, M. Cakmak, and S.S. Srinivasa
International ACM SIGACCESS Conference on Computers and Accessibility. 2019

Robot-Assisted Feeding: Generalizing Skewering Strategies across Food Items on a Plate
[C/J]
R. Feng, Y. Kim, G. Lee, E.K. Gordon, M. Schmittle, S. Kumar, T. Bhattacharjee, and S.S. Srinivasa
International Symposium on Robotics Research. 2019
R. Feng, Y. Kim, G. Lee, E.K. Gordon, M. Schmittle, S. Kumar, T. Bhattacharjee, and S.S. Srinivasa
International Symposium on Robotics Research. 2019
Transfer depends on Acquisition: Analyzing Manipulation Strategies for Robotic Feeding
[C/J]
D. Gallenberger, T. Bhattacharjee, Y. Kim, and S.S. Srinivasa
ACM/IEEE International Conference on Human-Robot Interaction. 2019
Best Paper Award Winner for Technical Advances in HRI
D. Gallenberger, T. Bhattacharjee, Y. Kim, and S.S. Srinivasa
ACM/IEEE International Conference on Human-Robot Interaction. 2019
Best Paper Award Winner for Technical Advances in HRI
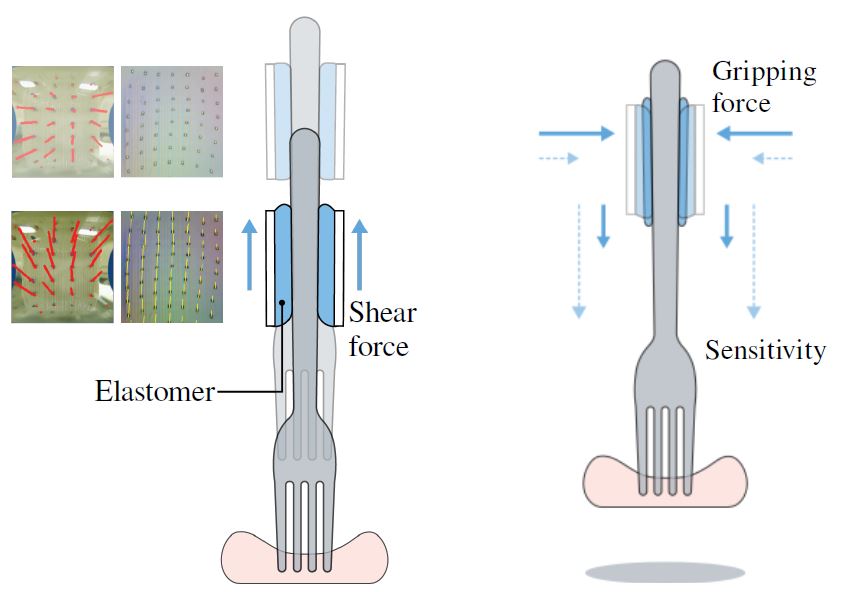
Sensing Shear Forces During Food Manipulation: Resolving the Trade-Off Between Range and Sensitivity
[C/J]
H. Song, T. Bhattacharjee, and S.S. Srinivasa
IEEE International Conference on Robotics and Automation. 2019
H. Song, T. Bhattacharjee, and S.S. Srinivasa
IEEE International Conference on Robotics and Automation. 2019
Towards Robotic Feeding: Role of Haptics in Fork-based Food Manipulation
[C/J]
T. Bhattacharjee, G. Lee, H. Song, and S.S. Srinivasa
IEEE Robotics and Automation Letters. 2019
T. Bhattacharjee, G. Lee, H. Song, and S.S. Srinivasa
IEEE Robotics and Automation Letters. 2019
Desk Organization: Effect of Multimodal Inputs on Spatial Relational Learning
[C/J]
R. Rowe, S. Singhal, D. Yi, T. Bhattacharjee, and S. S. Srinivasa
International Symposium on Robot and Human Interactive Communication. 2019
R. Rowe, S. Singhal, D. Yi, T. Bhattacharjee, and S. S. Srinivasa
International Symposium on Robot and Human Interactive Communication. 2019
A Contextual Bandit Framework for Adaptive Robotic Bite Acquisition
[O]
E.K. Gordon, X. Meng, T. Bhattacharjee, M. Barnes, and S. S. Srinivasa
Humanoids 2019 Workshop on Robotic Food Manipulation. 2019
E.K. Gordon, X. Meng, T. Bhattacharjee, M. Barnes, and S. S. Srinivasa
Humanoids 2019 Workshop on Robotic Food Manipulation. 2019
Learning from Failures in Robot-Assisted Feeding: Using Online Learning to Develop Manipulation Strategies for Bite Acquisition
[O]
E.K. Gordon, X. Meng, M. Barnes, T. Bhattacharjee, and S. S. Srinivasa
IJCAI 2019 Workshop on AIxFood. 2019
E.K. Gordon, X. Meng, M. Barnes, T. Bhattacharjee, and S. S. Srinivasa
IJCAI 2019 Workshop on AIxFood. 2019

Bite Acquisition of Soft Food Items via Reconfiguration
[O]
G. Lee, T. Bhattacharjee, and S. S. Srinivasa
RSS 2019 Workshop on Task-Informed Grasping (TIG-II) - From Perception to Physical Interaction. 2019
G. Lee, T. Bhattacharjee, and S. S. Srinivasa
RSS 2019 Workshop on Task-Informed Grasping (TIG-II) - From Perception to Physical Interaction. 2019
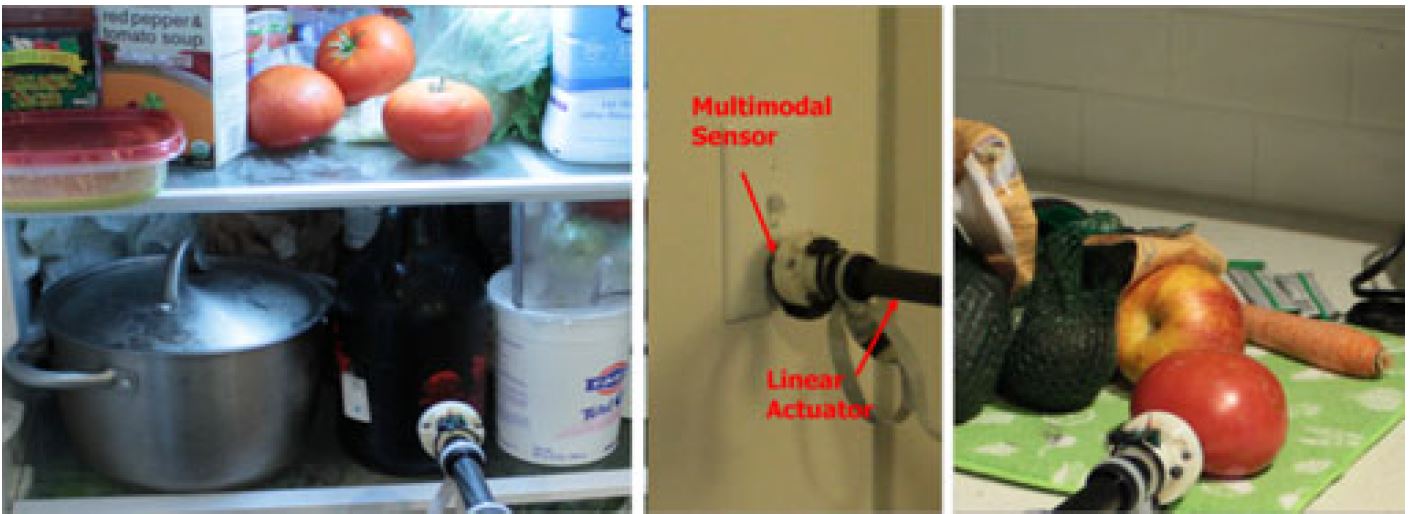
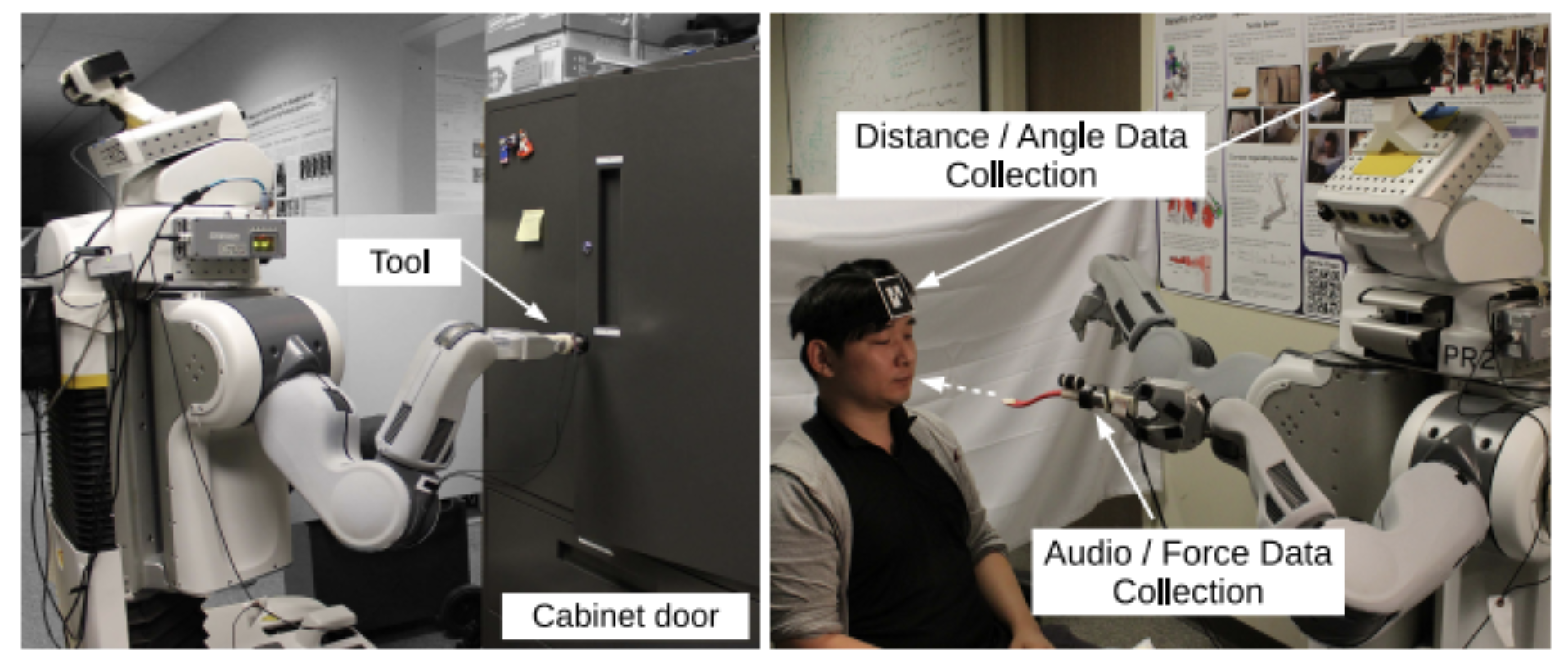
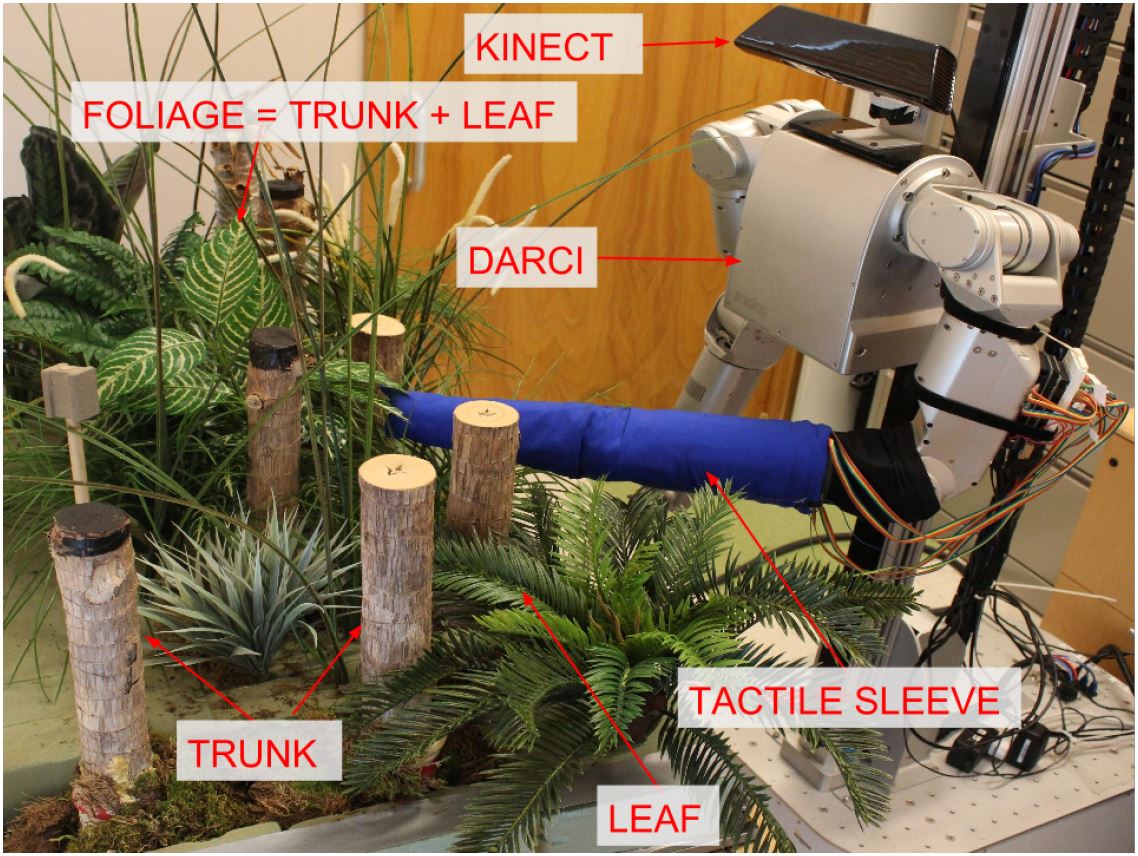
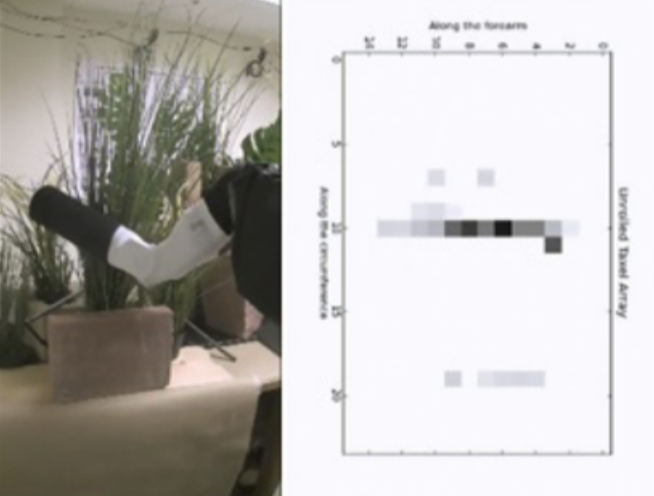
Multimodal Tactile Perception of Objects in a Real Home
[C/J]
T. Bhattacharjee, H. M. Clever, J. Wade, and C. C. Kemp
IEEE Robotics and Automation Letters. 2018
T. Bhattacharjee, H. M. Clever, J. Wade, and C. C. Kemp
IEEE Robotics and Automation Letters. 2018
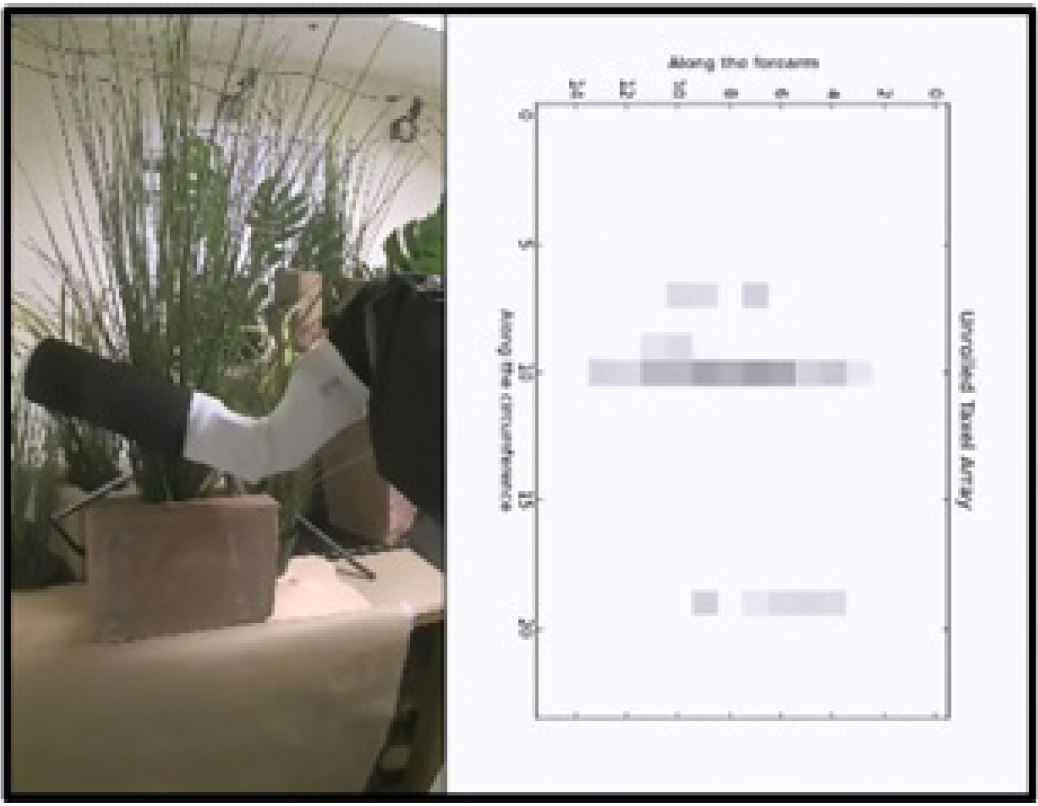
Inferring Object Properties with a Tactile-Sensing Array Given Varying Joint Stiffness and Velocity
[C/J]
T. Bhattacharjee, J. M. Rehg, and C. C. Kemp
International Journal of Humanoid Robotics. 2018
T. Bhattacharjee, J. M. Rehg, and C. C. Kemp
International Journal of Humanoid Robotics. 2018
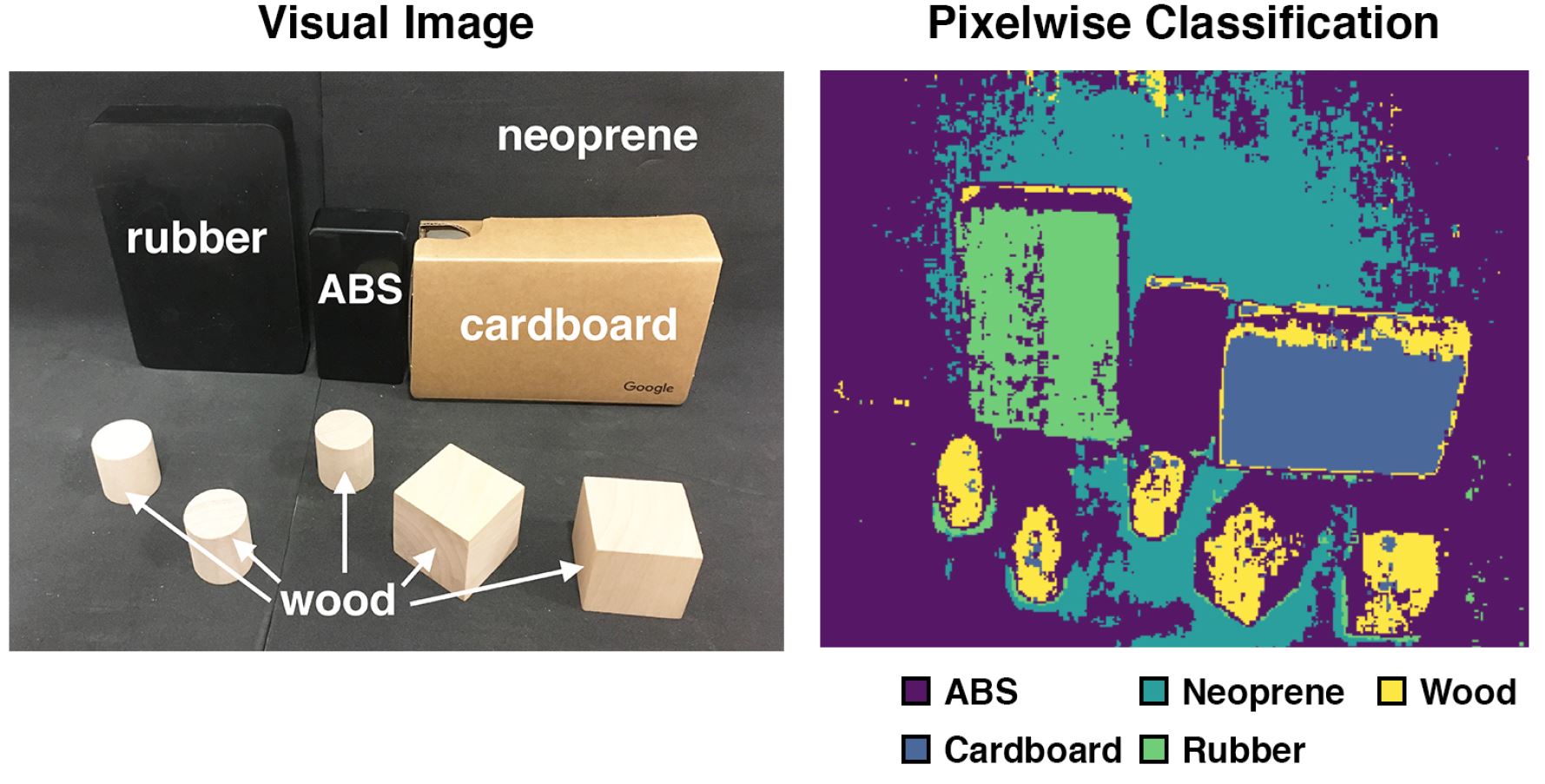
Towards Material Classification of Scenes using Active Thermography
[C/J]
H. Bai, T. Bhattacharjee, H. Chen, A. Kapusta, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2018
H. Bai, T. Bhattacharjee, H. Chen, A. Kapusta, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2018
Autonomous robot feeding for upper-extremity mobility impaired people: Integrating sensing, perception, learning, motion planning, and robot control
[O]
T. Bhattacharjee, D. Gallenberger, D. Dubois, L. L'Écuyer-Lapiere, Y. Kim, A. Mandalika, R. Scalise, R. Qu, H. Song, E. Gordon, and S.S. Srinivasa
Conference on Neural Information Processing Systems (NeurIPS). 2018
Best Demonstration Award Winner
T. Bhattacharjee, D. Gallenberger, D. Dubois, L. L'Écuyer-Lapiere, Y. Kim, A. Mandalika, R. Scalise, R. Qu, H. Song, E. Gordon, and S.S. Srinivasa
Conference on Neural Information Processing Systems (NeurIPS). 2018
Best Demonstration Award Winner
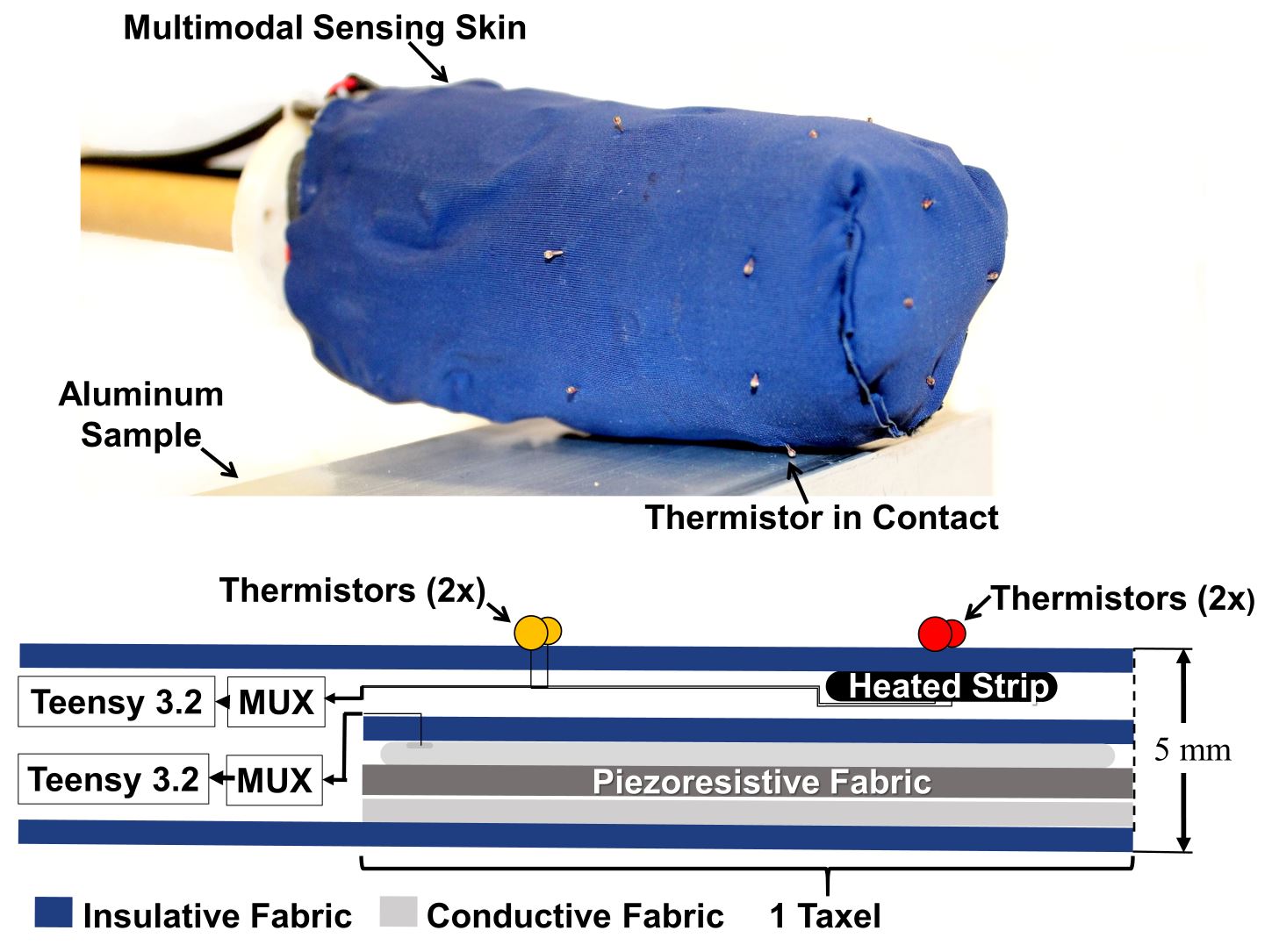
A Force and Thermal Sensing Skin for Robots in Human Environments
[C/J]
J. Wade, T. Bhattacharjee, R. D. Williams, and C. C. Kemp
Robotics and Autonomous Systems. 2017
J. Wade, T. Bhattacharjee, R. D. Williams, and C. C. Kemp
Robotics and Autonomous Systems. 2017
Older Adults' Acceptance of a Robot for Partner Dance-based Exercise
[C/J]
T. L. Chen, T. Bhattacharjee, J. M. Beer, L. H. Ting, M. E. Hackney, W. A. Rogers, and C. C. Kemp
PLOS One. 2017
T. L. Chen, T. Bhattacharjee, J. M. Beer, L. H. Ting, M. E. Hackney, W. A. Rogers, and C. C. Kemp
PLOS One. 2017
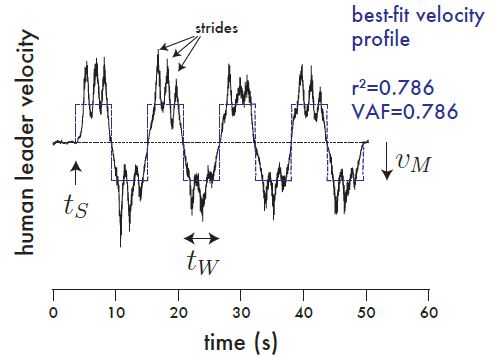
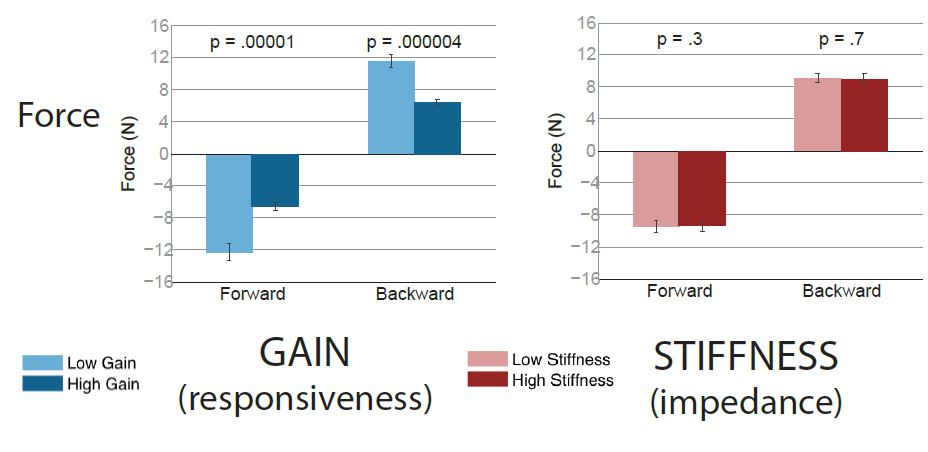
Small Forces that differ with Prior Motor Experience can Communicate Movement Goals during Human-Human Physical Interaction
[C/J]
A. Sawers, T. Bhattacharjee, J. L. McKay, M. E. Hackney, C. C. Kemp, and L. H. Ting
Journal of NeuroEngineering and Rehabilitation. 2017
A. Sawers, T. Bhattacharjee, J. L. McKay, M. E. Hackney, C. C. Kemp, and L. H. Ting
Journal of NeuroEngineering and Rehabilitation. 2017
Rapid Haptic Perception using Force and Thermal Sensing
[O]
T. Bhattacharjee
Ph.D. Dissertation. 2017
T. Bhattacharjee
Ph.D. Dissertation. 2017
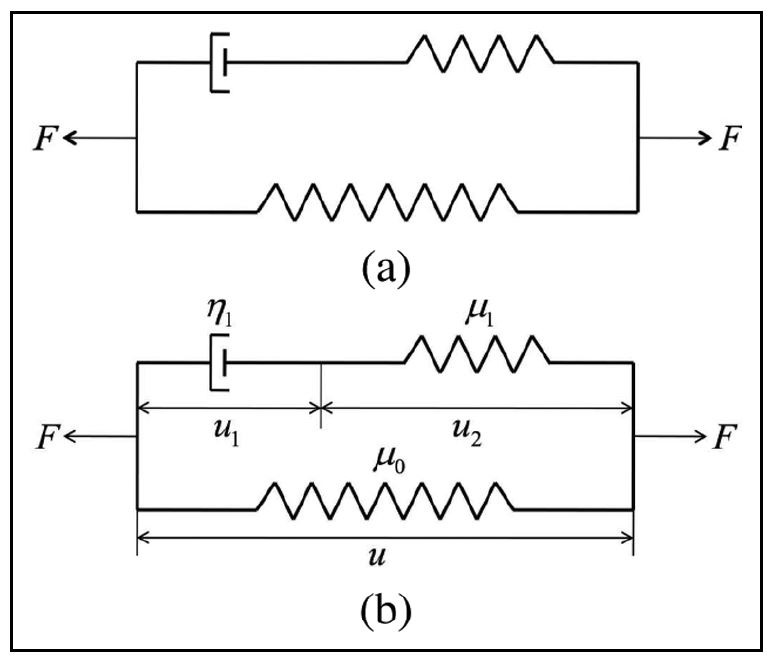
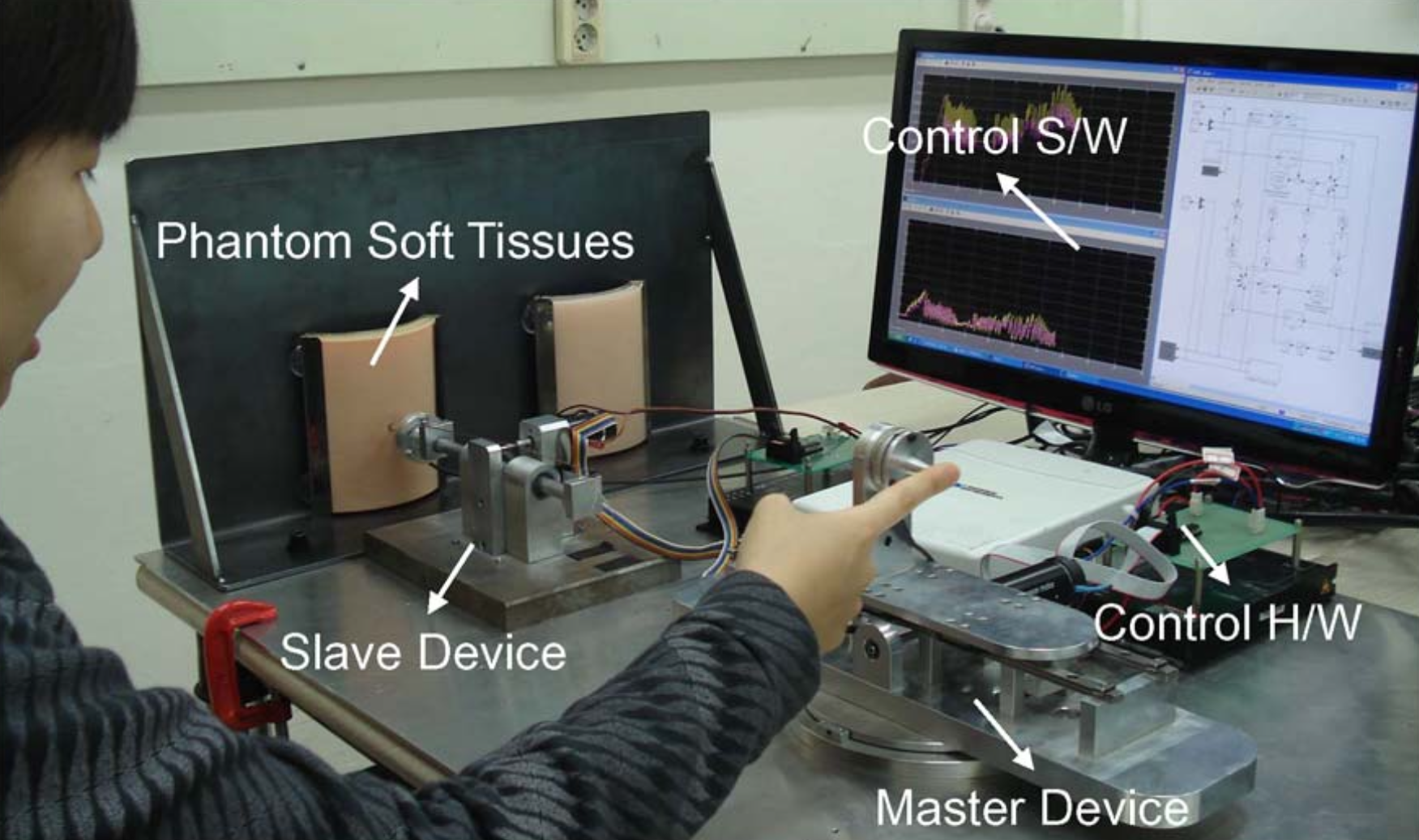
A Passivity Criterion for Real-Time Haptic Simulation of Viscoelastic Soft Tissues
[C/J]
H. I. Son and T. Bhattacharjee
Part I- Journal of Systems and Control Engineering. 2016
H. I. Son and T. Bhattacharjee
Part I- Journal of Systems and Control Engineering. 2016

A CRF that Combines Touch and Vision for Haptic Mapping
[C/J]
A. A. Shenoi, T. Bhattacharjee, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2016
A. A. Shenoi, T. Bhattacharjee, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2016
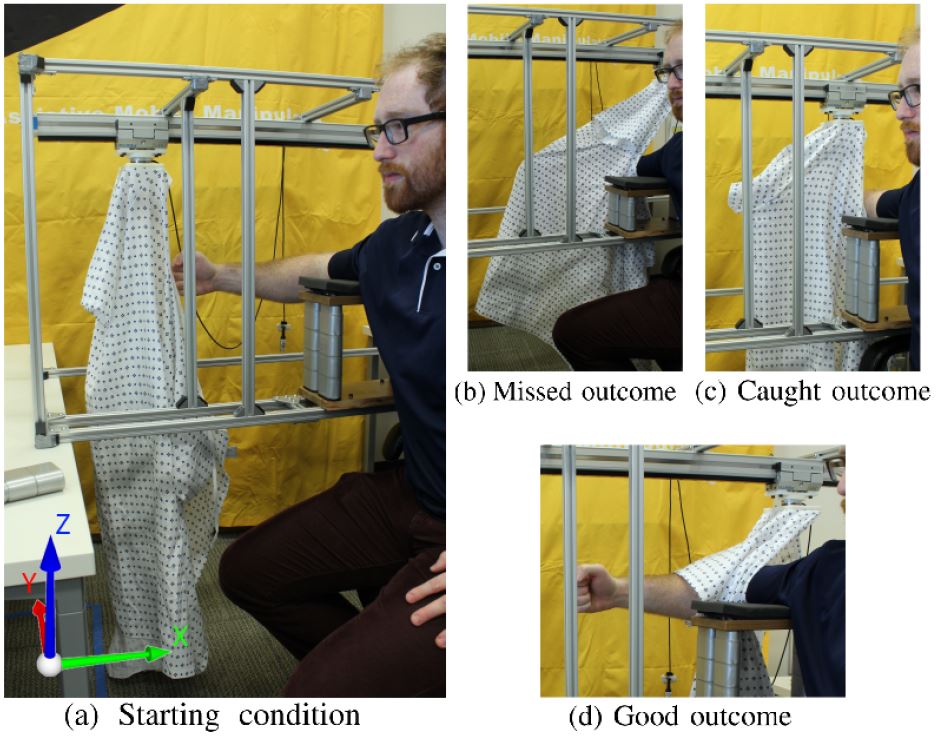
Data-driven Haptic Perception for Robot-Assisted Dressing
[C/J]
A. Kapusta, W. Yu, T. Bhattacharjee, C. K. Liu, G. Turk, and C. C. Kemp
IEEE International Symposium on Robot and Human Interactive Communication. 2016
A. Kapusta, W. Yu, T. Bhattacharjee, C. K. Liu, G. Turk, and C. C. Kemp
IEEE International Symposium on Robot and Human Interactive Communication. 2016
Force and Thermal Sensing with a Fabric-based Skin
[O]
J. Wade, T. Bhattacharjee, and C. C. Kemp
IROS 2016 Workshop - See, Touch and Hear - Workshop on Multimodal Sensor-based Robot Control for HRI and Soft Manipulation. 2016
J. Wade, T. Bhattacharjee, and C. C. Kemp
IROS 2016 Workshop - See, Touch and Hear - Workshop on Multimodal Sensor-based Robot Control for HRI and Soft Manipulation. 2016
Multimodal Execution Monitoring for Anomaly Detection During Robot Manipulation
[C/J]
D. Park, Z. Erickson, T. Bhattacharjee, and C. C. Kemp
IEEE International Conference on Robotics and Automation. 2016
D. Park, Z. Erickson, T. Bhattacharjee, and C. C. Kemp
IEEE International Conference on Robotics and Automation. 2016
Data-driven Thermal Recognition of Contact with People and Objects
[C/J]
T. Bhattacharjee, J. Wade, Y. Chitalia, and C. C. Kemp
IEEE Haptics Symposium. 2016
T. Bhattacharjee, J. Wade, Y. Chitalia, and C. C. Kemp
IEEE Haptics Symposium. 2016
Evaluation by Expert Dancers of a Robot that performs Partnered Stepping via Haptic Interaction
[C/J]
T. L. Chen, T. Bhattacharjee, J. L. Mckay, J. E. Borinski, M. E. Hackney, L. H. Ting, and C. C. Kemp
PLOS One. 2015
Pick of the week in the literature survey of 'latest and greatest articles' published in Biomechanics circles
T. L. Chen, T. Bhattacharjee, J. L. Mckay, J. E. Borinski, M. E. Hackney, L. H. Ting, and C. C. Kemp
PLOS One. 2015
Pick of the week in the literature survey of 'latest and greatest articles' published in Biomechanics circles
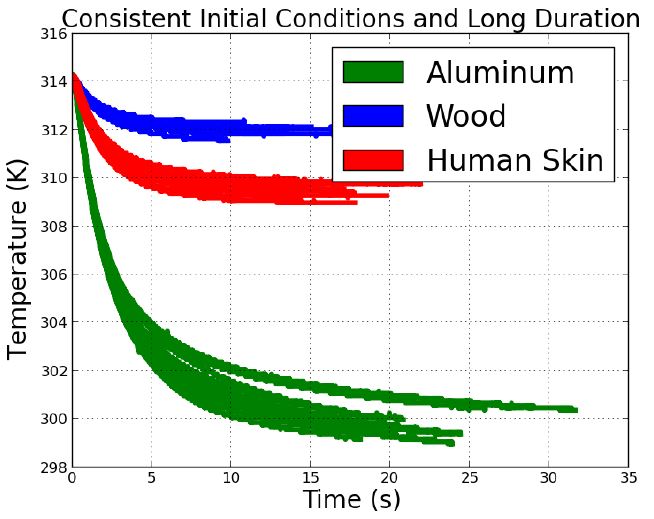
Material Recognition from Heat Transfer given Varying Initial Conditions and Short-Duration Contact
[C/J]
T. Bhattacharjee, J. Wade, and C. C. Kemp
Robotics Science and Systems. 2015
T. Bhattacharjee, J. Wade, and C. C. Kemp
Robotics Science and Systems. 2015
Combining Tactile Sensing and Vision for Rapid Haptic Mapping
[C/J]
T. Bhattacharjee, A. A. Shenoi, D. Park, J. M. Rehg, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2015
T. Bhattacharjee, A. A. Shenoi, D. Park, J. M. Rehg, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2015
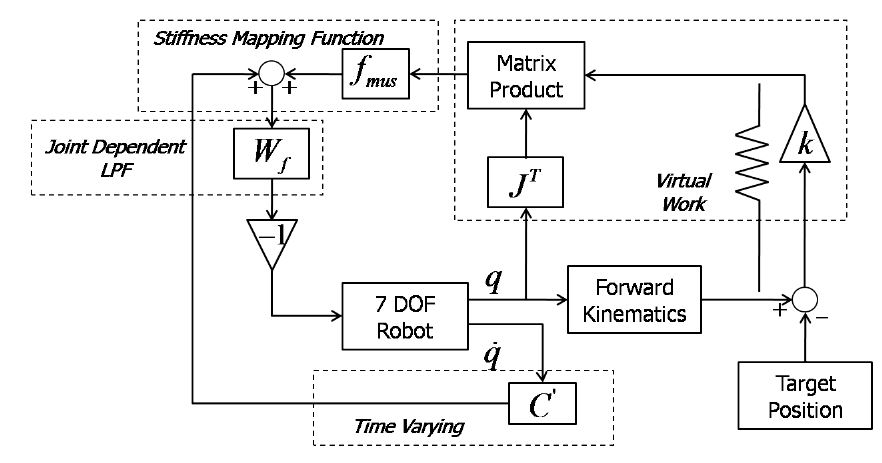
Antagonistic Muscle Based Robot Control for Physical Interactions
[C/J]
T. Bhattacharjee and G. Niemeyer
IEEE International Conference on Robotics and Automation. 2015
T. Bhattacharjee and G. Niemeyer
IEEE International Conference on Robotics and Automation. 2015
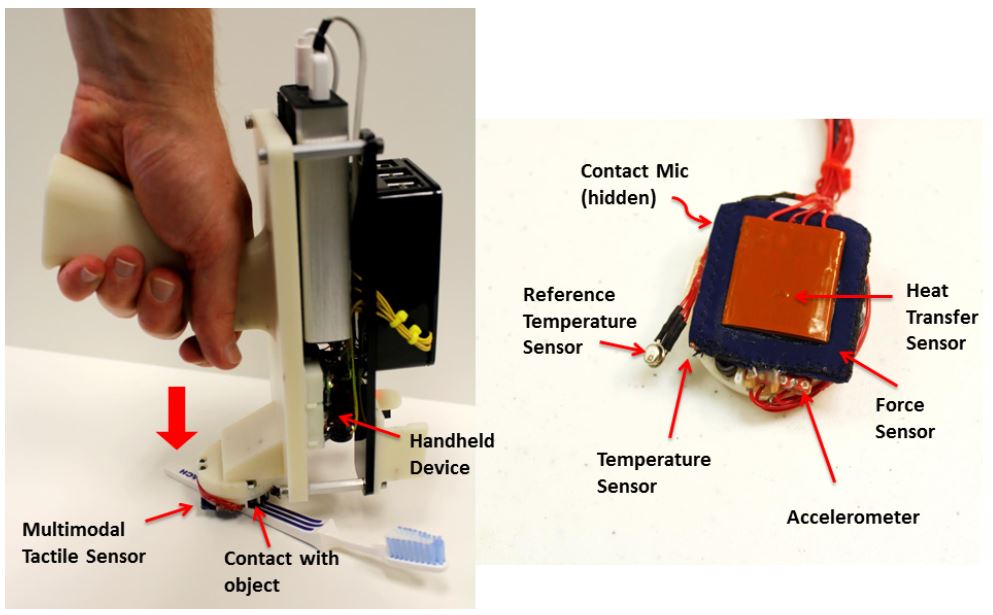
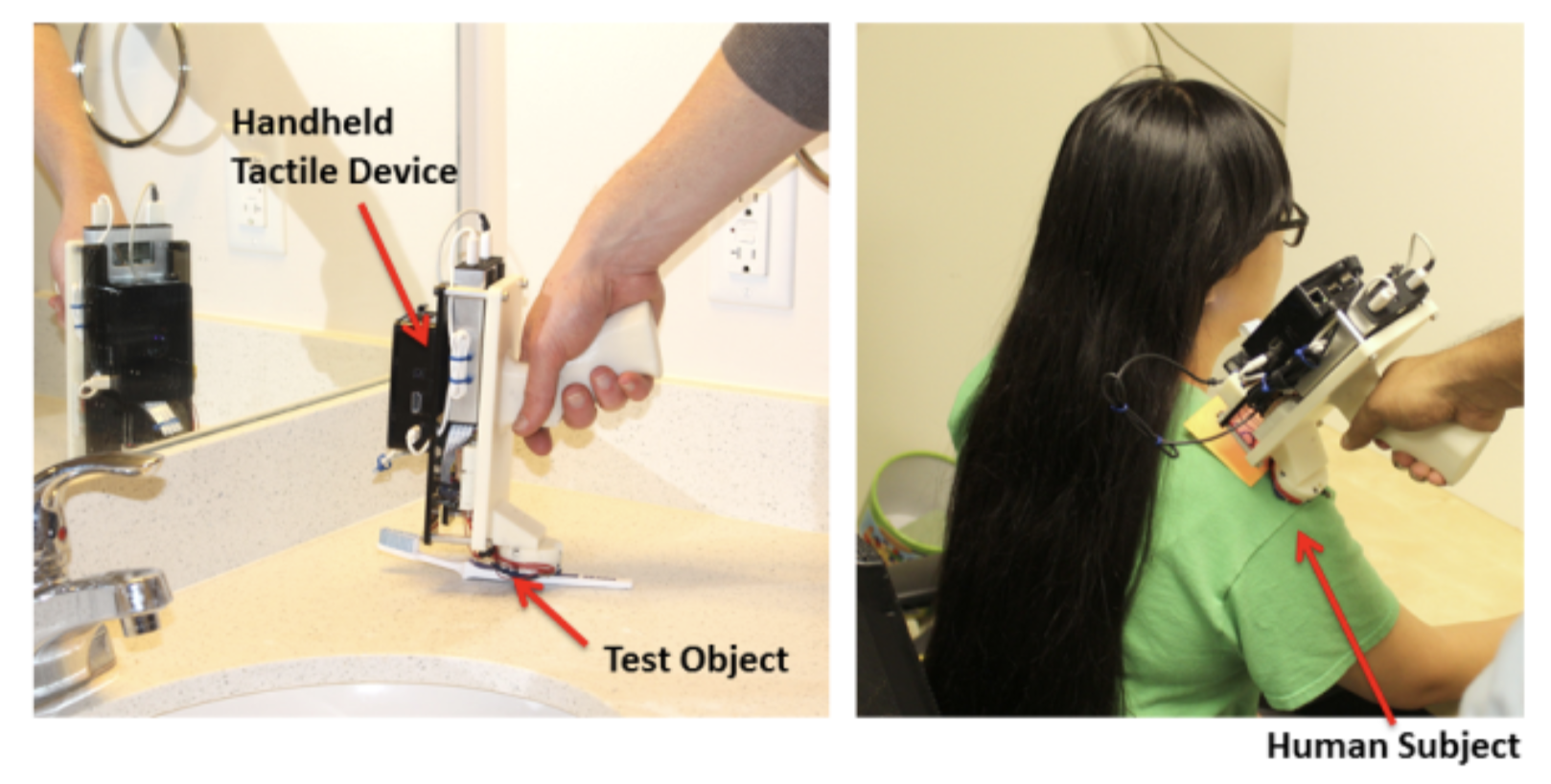
A Handheld Device for the In Situ Acquisition of Multimodal Tactile Sensing Data
[O]
J. Wade, T. Bhattacharjee, and C. C. Kemp
IROS 2015 Workshop - See and Touch - 1st Workshop on Multimodal Sensor-based Robot Control for HRI and Soft Manipulation. 2015
J. Wade, T. Bhattacharjee, and C. C. Kemp
IROS 2015 Workshop - See and Touch - 1st Workshop on Multimodal Sensor-based Robot Control for HRI and Soft Manipulation. 2015
Sensing Incidental Contact to inform Manipulation in Clutter
[O]
T. Bhattacharjee and C. C. Kemp
RSS 2015 Workshop - Learning for Visual and Tactile Interaction. 2015
T. Bhattacharjee and C. C. Kemp
RSS 2015 Workshop - Learning for Visual and Tactile Interaction. 2015
Haptic Perception during Manipulation Tasks using Whole Arm Tactile Sensing
[O]
T. Bhattacharjee and C. C. Kemp
ICRA 2015 Workshop - "Get in Touch!" Tactile & Force Sensing for Autonomous, Compliant, Intelligent Robots. 2015
T. Bhattacharjee and C. C. Kemp
ICRA 2015 Workshop - "Get in Touch!" Tactile & Force Sensing for Autonomous, Compliant, Intelligent Robots. 2015
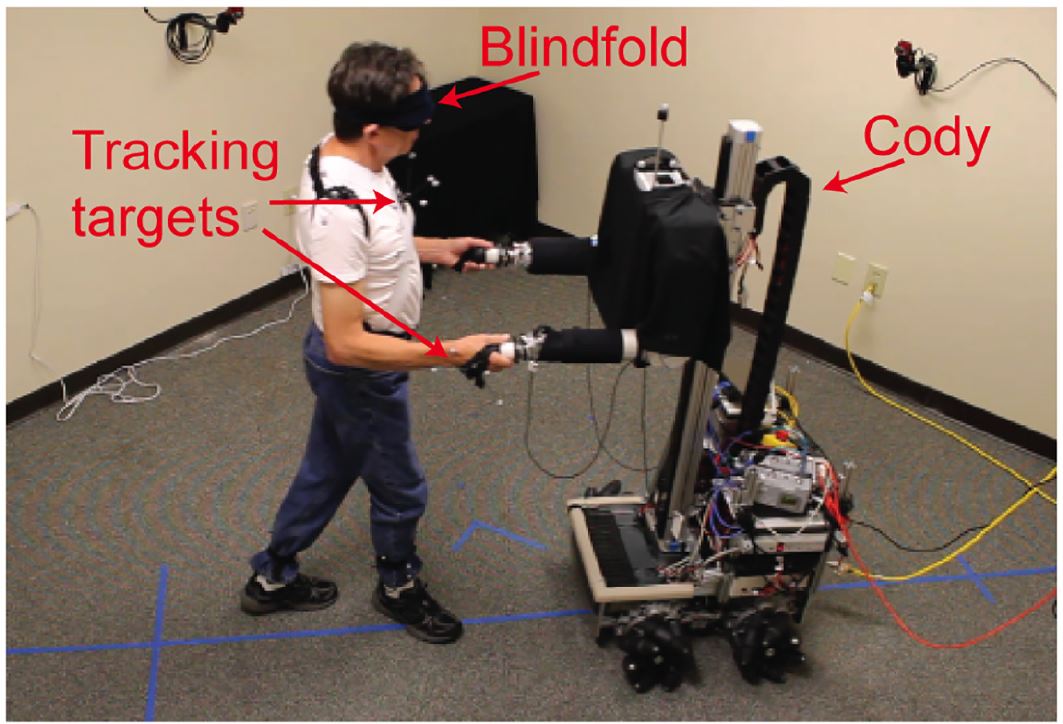
Human Arms Remove Energy during Blindfolded Partnered Stepping Tasks with a Robot Follower
[O]
Y. S. Song, T. L. Chen, T. Bhattacharjee, J. L. Mckay, M. E. Hackney, C. C. Kemp, and L. H. Ting
ICRA 2015 Workshop on Rehabilitation Robotics and Human Robot Interaction. 2015
Y. S. Song, T. L. Chen, T. Bhattacharjee, J. L. Mckay, M. E. Hackney, C. C. Kemp, and L. H. Ting
ICRA 2015 Workshop on Rehabilitation Robotics and Human Robot Interaction. 2015
Human Arms Remove Energy for Increased Stability during Partnered Stepping Tasks with a Robot Follower
[O]
Y. S. Song, T. L. Chen, T. Bhattacharjee, J. L. Mckay, M. E. Hackney, C. C. Kemp, and L. H. Ting
Society of Neural Control of Movement (NCM) 25th Annual Meeting. 2015
Y. S. Song, T. L. Chen, T. Bhattacharjee, J. L. Mckay, M. E. Hackney, C. C. Kemp, and L. H. Ting
Society of Neural Control of Movement (NCM) 25th Annual Meeting. 2015

Human Arms Remove Energy during Partnered Stepping Tasks with a Robot Follower
[O]
Y. S. Song, T. L. Chen, T. Bhattacharjee, J. L. Mckay, M. E. Hackney, C. C. Kemp, and L. H. Ting
3rd ASU Rehabilitation Robotics Workshop. 2015
Y. S. Song, T. L. Chen, T. Bhattacharjee, J. L. Mckay, M. E. Hackney, C. C. Kemp, and L. H. Ting
3rd ASU Rehabilitation Robotics Workshop. 2015
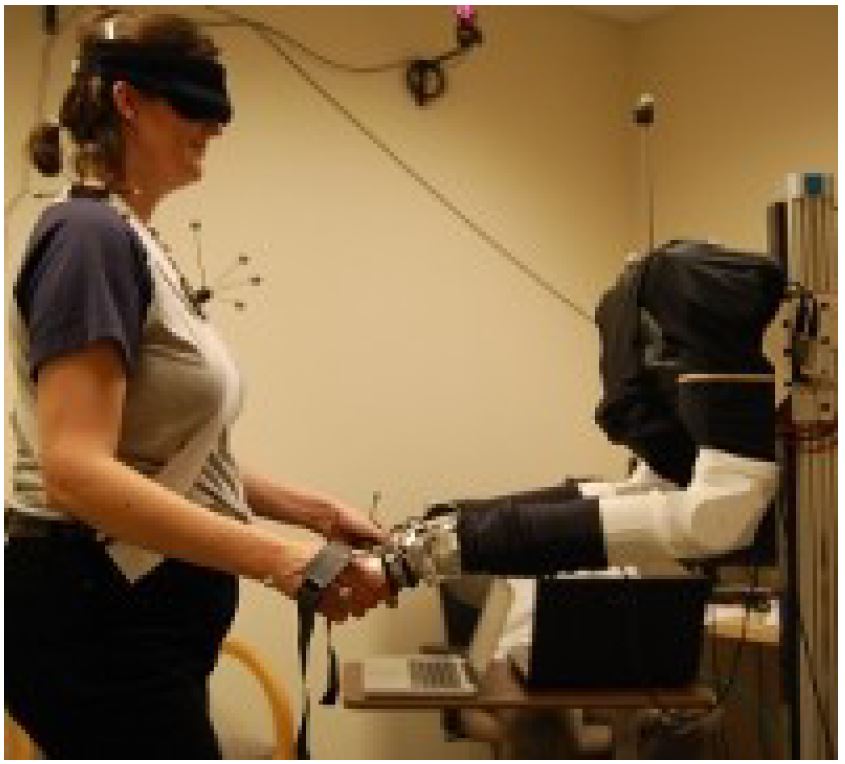
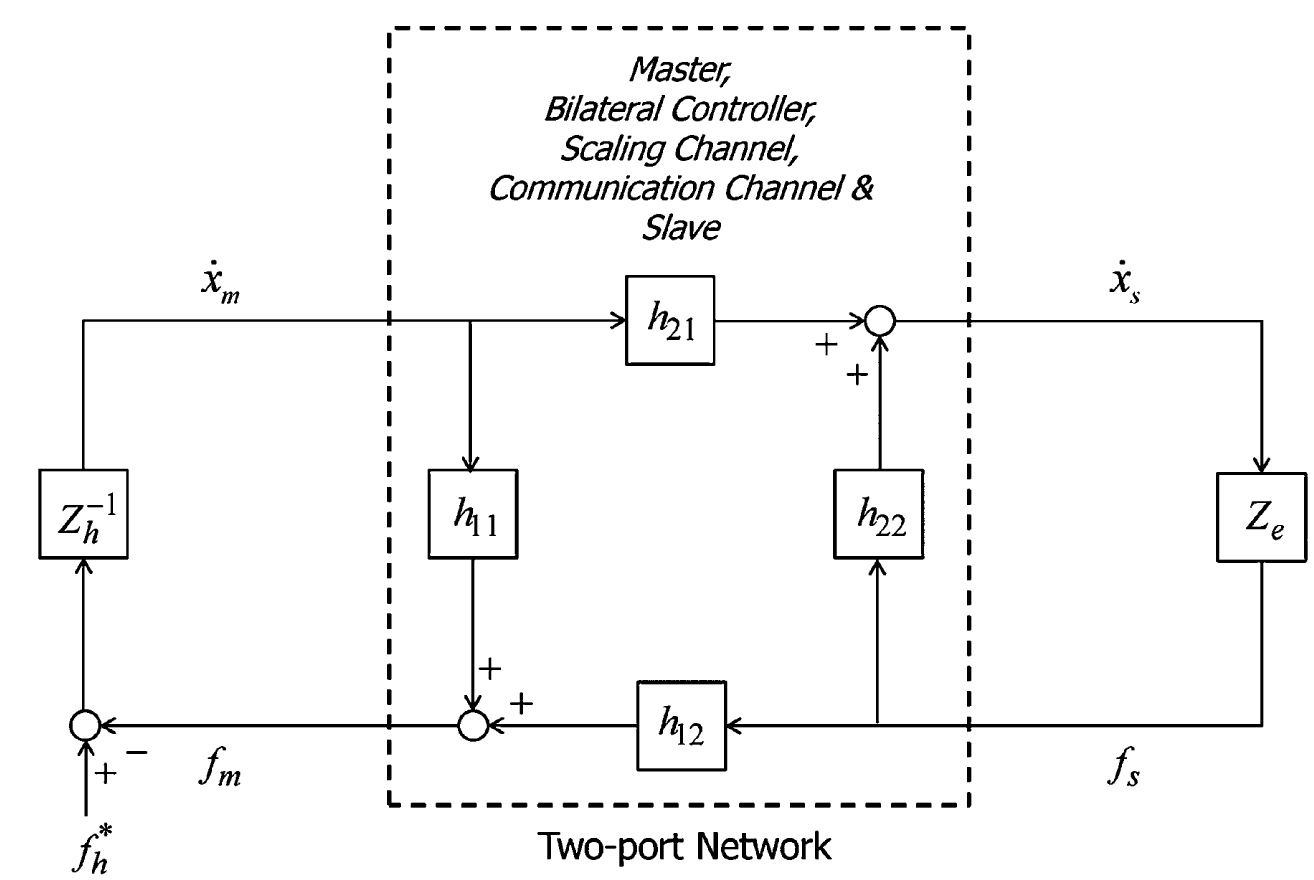
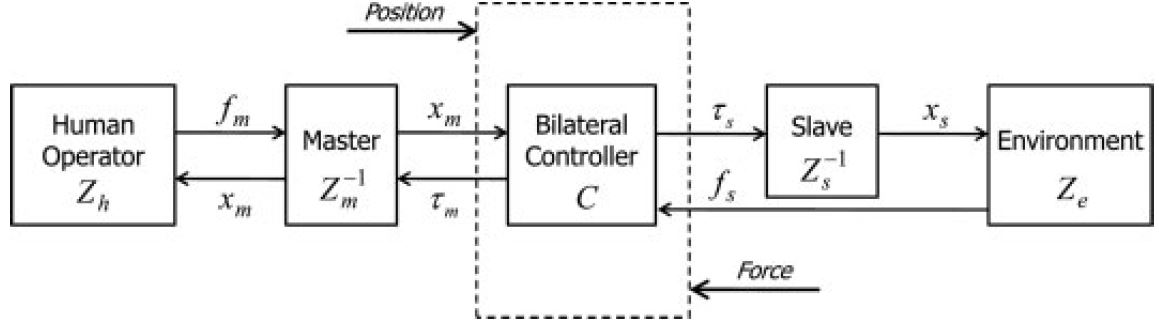
Analytical and Psychophysical Comparison of Bilateral Teleoperators for Enhanced Perceptual Performance
[C/J]
H. I. Son, J. H. Cho, T. Bhattacharjee, H. R. Jung, and D. Y. Lee
IEEE Transactions on Industrial Electronics. 2014
H. I. Son, J. H. Cho, T. Bhattacharjee, H. R. Jung, and D. Y. Lee
IEEE Transactions on Industrial Electronics. 2014

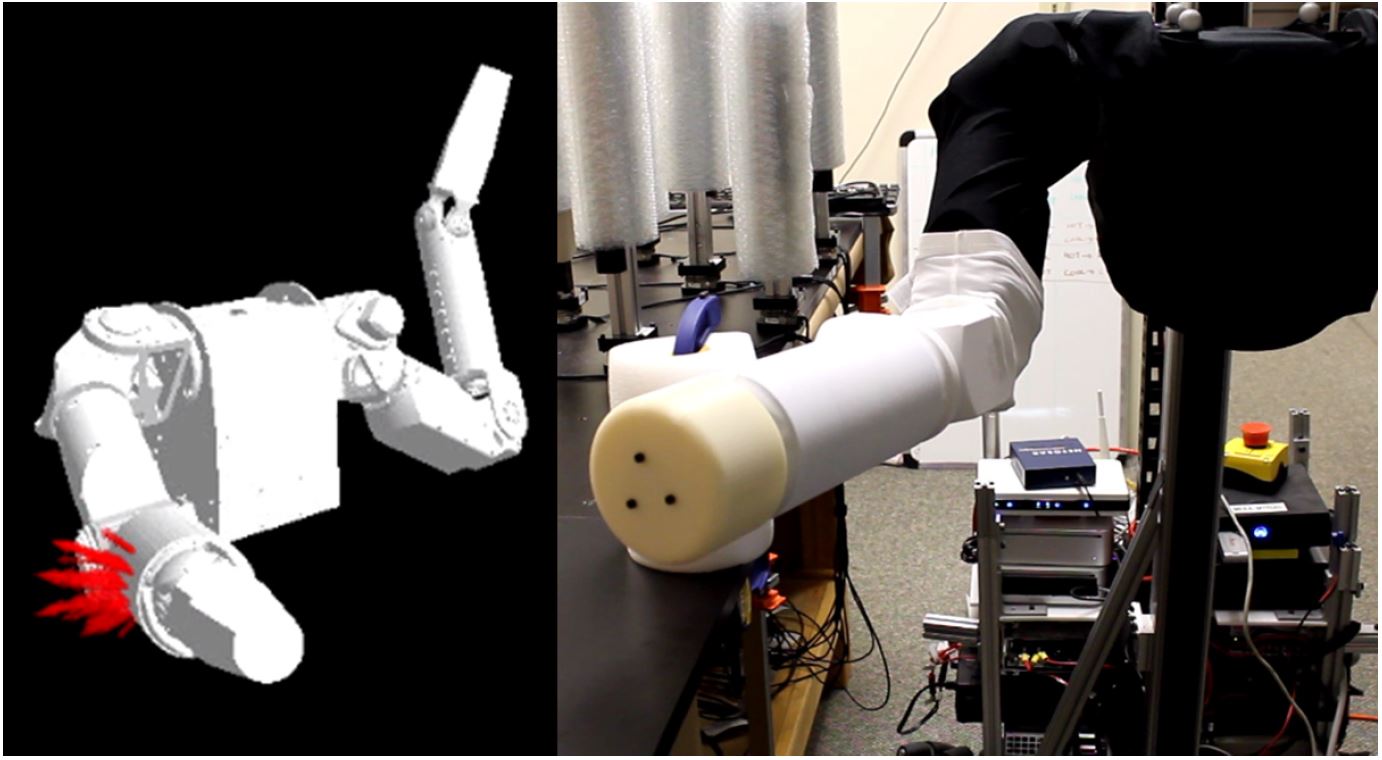
A Robotic System for Reaching in Dense Clutter that Integrates Model Predictive Control, Learning, Haptic Mapping, and Planning
[O]
T. Bhattacharjee, P. M. Grice, A. Kapusta, M. D. Killpack, D. Park, and C. C. Kemp
IROS 2014 Workshop - 3rd Workshop on Robots in Clutter - Perception and Interaction in Clutter. 2014
T. Bhattacharjee, P. M. Grice, A. Kapusta, M. D. Killpack, D. Park, and C. C. Kemp
IROS 2014 Workshop - 3rd Workshop on Robots in Clutter - Perception and Interaction in Clutter. 2014
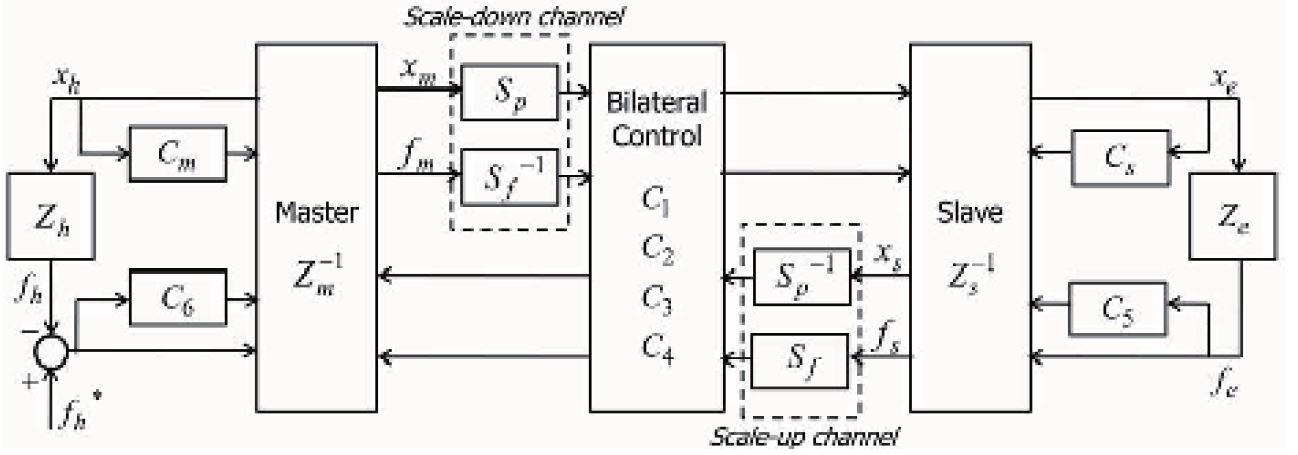
Gain-Scheduling Control of Teleoperation Systems Interacting with Soft Tissues
[C/J]
J. H. Cho, H. I. Son, D. G. Lee, T. Bhattacharjee, H. R. Jung, and D. Y. Lee
IEEE Transactions on Industrial Electronics. 2013
J. H. Cho, H. I. Son, D. G. Lee, T. Bhattacharjee, H. R. Jung, and D. Y. Lee
IEEE Transactions on Industrial Electronics. 2013
Rapid Categorization of Object Properties from Incidental Contact with a Tactile Sensing Robot Arm
[C/J]
T. Bhattacharjee, A. Kapusta, J. M. Rehg, and C. C. Kemp
IEEE International Conference on Humanoid Robotics. 2013
T. Bhattacharjee, A. Kapusta, J. M. Rehg, and C. C. Kemp
IEEE International Conference on Humanoid Robotics. 2013

Tactile Sensing over Articulated Joints with Stretchable Sensors
[C/J]
T. Bhattacharjee, A. Jain, S. Vaish, M. D. Killpack, and C. C. Kemp
IEEE World Haptics Conference. 2013
T. Bhattacharjee, A. Jain, S. Vaish, M. D. Killpack, and C. C. Kemp
IEEE World Haptics Conference. 2013
A Simple Model of Dynamic Interaction Forces during Human-Robot Partnered Motion
[O]
J. L. McKay, M. Huang, T. L. Chen, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
Piper Health Solutions Workshop on Rehabilitation Robotics. 2013
J. L. McKay, M. Huang, T. L. Chen, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
Piper Health Solutions Workshop on Rehabilitation Robotics. 2013
Partnered Human-Robot Stepping Based on Interactive Forces at the Hand
[O]
T. L. Chen, J. L. McKay, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
Piper Health Solutions Workshop on Rehabilitation Robotics. 2013
T. L. Chen, J. L. McKay, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
Piper Health Solutions Workshop on Rehabilitation Robotics. 2013
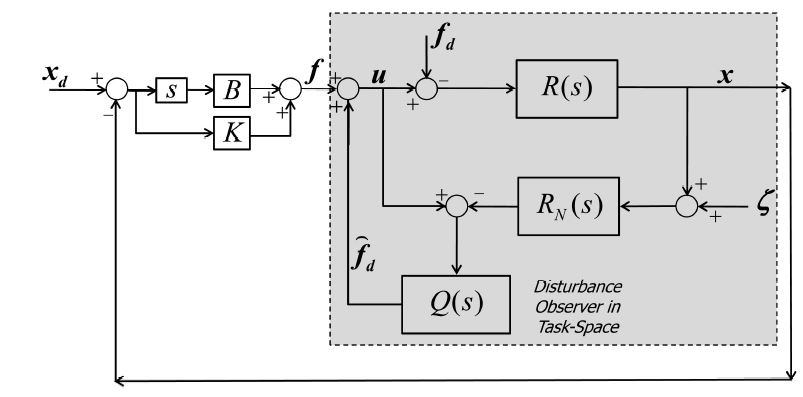
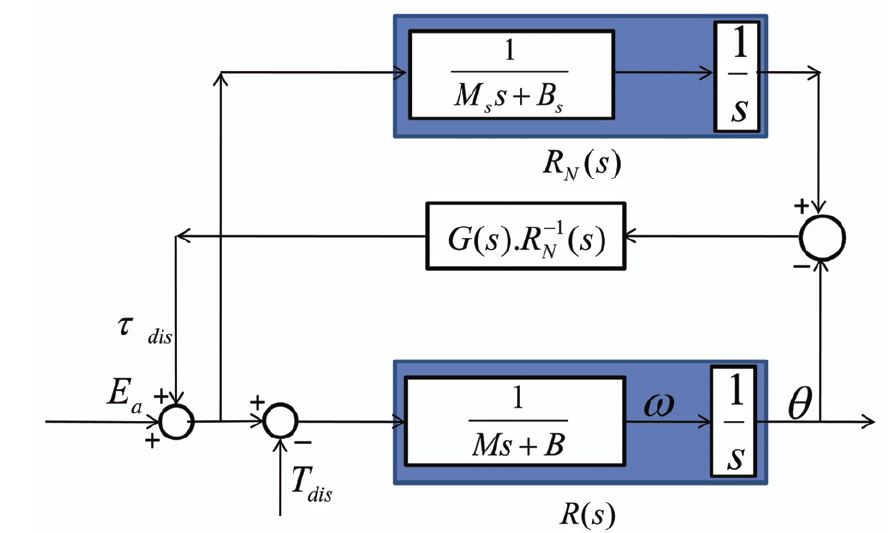
Non-linear Task-Space Disturbance Observer for Position Regulationof Redundant Robot Arms against Perturbations in 3D Environments
[O]
T. Bhattacharjee, Y. Oh, and S. R. Oh
Technical Report, arXiv-1311.0388.. 2013
T. Bhattacharjee, Y. Oh, and S. R. Oh
Technical Report, arXiv-1311.0388.. 2013
Validation of a Control Algorithm for Human-like Reaching Motion using 7-DOF Arm and 19-DOF Hand-Arm Systems
[O]
T. Bhattacharjee, Y. Oh, and S. R. Oh
Technical Report, arXiv-1311.0959. 2013
T. Bhattacharjee, Y. Oh, and S. R. Oh
Technical Report, arXiv-1311.0959. 2013
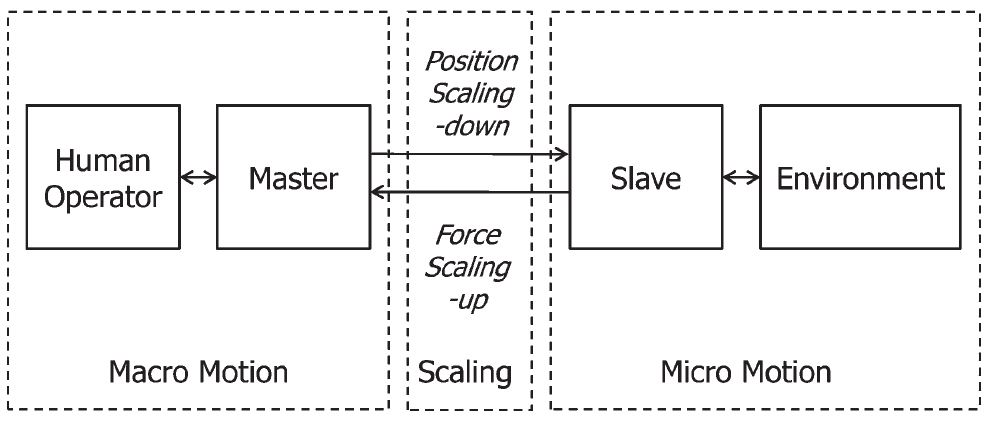
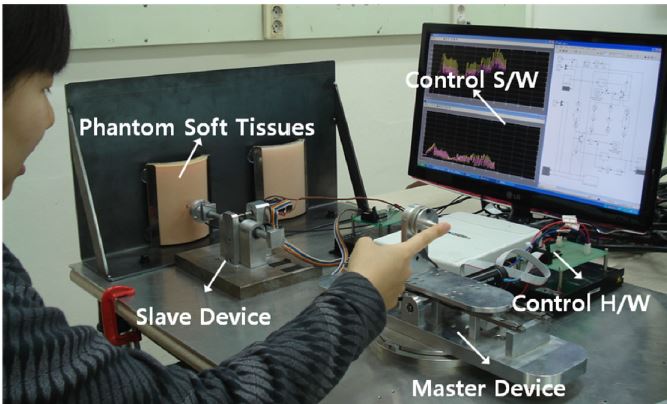
Effect of Impedance-Shaping on Perception of Soft Tissues in Macro-Micro Teleoperation
[C/J]
H. I. Son, T. Bhattacharjee, and H. Hashimoto
IEEE Transactions on Industrial Electronics. 2012
H. I. Son, T. Bhattacharjee, and H. Hashimoto
IEEE Transactions on Industrial Electronics. 2012
Haptic Classification and Recognition of Objects using a Tactile Sensing Forearm
[C/J]
T. Bhattacharjee, J. M. Rehg, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2012
T. Bhattacharjee, J. M. Rehg, and C. C. Kemp
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2012
Partnered Human-Robot Stepping Based on Interactive Forces at the Hand
[O]
T. L. Chen, J. L. McKay, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
American Society of Biomechanics (ASB) Annual Meeting. 2012
T. L. Chen, J. L. McKay, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
American Society of Biomechanics (ASB) Annual Meeting. 2012
Partnered Human-Robot Stepping Based on Interactive Forces at the Hand
[O]
T. L. Chen, J. L. McKay, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
Biomedical Engineering Society (BMES) Meeting. 2012
T. L. Chen, J. L. McKay, T. Bhattacharjee, M. E. Hackney, C. C. Kemp, and L. H. Ting
Biomedical Engineering Society (BMES) Meeting. 2012

Enhancement in Operator's Perception of Soft Tissues and its Experimental Validation for Scaled Teleoperation Systems
[C/J]
H. I. Son, T. Bhattacharjee, and H. Hashimoto
IEEE Transactions on Mechatronics. 2011
H. I. Son, T. Bhattacharjee, and H. Hashimoto
IEEE Transactions on Mechatronics. 2011
Effect of Scaling on the Performance and Stability of Teleoperation Systems Interacting with Soft Environments
[C/J]
H. I. Son, T. Bhattacharjee, and H. Hashimoto
Advanced Robotics. 2011
H. I. Son, T. Bhattacharjee, and H. Hashimoto
Advanced Robotics. 2011
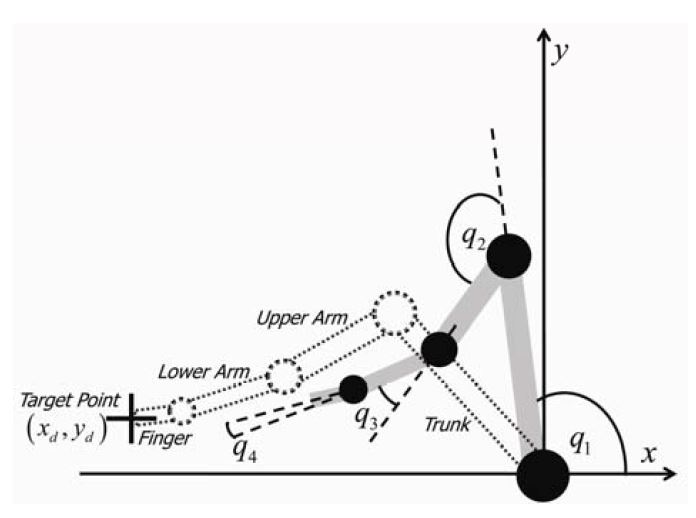
Control Design for Human-like Reaching Movements using Redundancy in Robot Arm-Trunk Systems
[C/J]
T. Bhattacharjee, Y. Oh, J. H. Bae, and S. R. Oh
International Journal of Control Automation and Systems. 2011
T. Bhattacharjee, Y. Oh, J. H. Bae, and S. R. Oh
International Journal of Control Automation and Systems. 2011
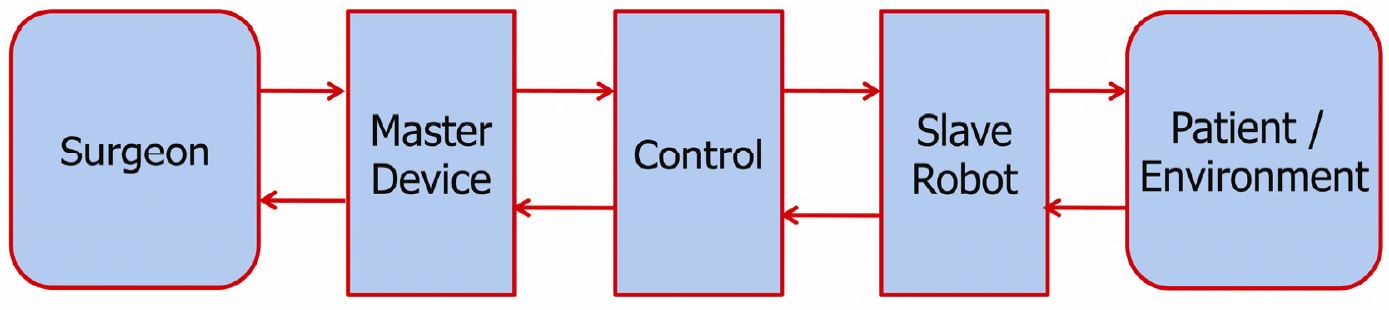
Estimation of Environmental Force for the Haptic Interface of Robotic Surgery
[C/J]
H. I. Son, T. Bhattacharjee, and D. Y. Lee
International Journal of Medical Robotics and Computer Assisted Surgery. 2010
H. I. Son, T. Bhattacharjee, and D. Y. Lee
International Journal of Medical Robotics and Computer Assisted Surgery. 2010

Controlling Redundant Robot Arm-Trunk Systems for Human-like Reaching Motion
[C/J]
T. Bhattacharjee, Y. Oh, J. H. Bae, and S. R. Oh
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2010
T. Bhattacharjee, Y. Oh, J. H. Bae, and S. R. Oh
IEEE/RSJ International Conference on Intelligent Robots and Systems. 2010
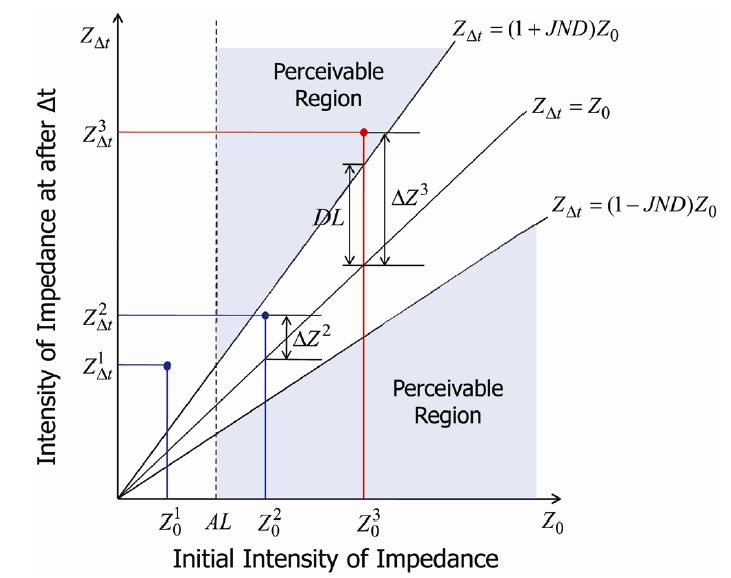
Psychophysical Evaluation of Control Scheme Designed for Optimal Kinesthetic Perception in Scaled Teleoperation
[C/J]
H. I. Son, T. Bhattacharjee, H. R. Jung, and D. Y. Lee
IEEE International Conference on Robotics and Automation. 2010
H. I. Son, T. Bhattacharjee, H. R. Jung, and D. Y. Lee
IEEE International Conference on Robotics and Automation. 2010
Position-Position Control with Gain-Scheduling for Telesurgical Systems
[C/J]
J. H. Cho, H. I. Son, T. Bhattacharjee, D. G. Lee, and D. Y. Lee
International Conference on Advanced Mechatronics. 2010
J. H. Cho, H. I. Son, T. Bhattacharjee, D. G. Lee, and D. Y. Lee
International Conference on Advanced Mechatronics. 2010
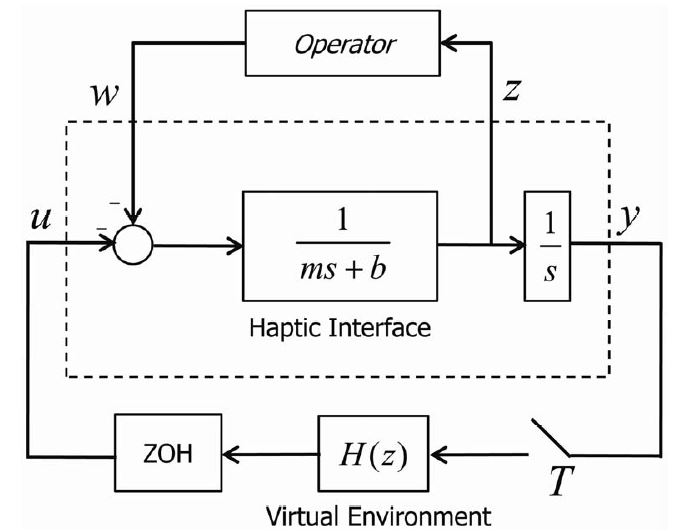
Passivity Analysis of Haptic Systems Interacting with Viscoelastic Virtual Environment
[C/J]
H. I. Son, T. Bhattacharjee, and D. Y. Lee
International Conference on Advanced Robotics. 2009
H. I. Son, T. Bhattacharjee, and D. Y. Lee
International Conference on Advanced Robotics. 2009
Control Design Based on Analytical Stability Criteria for Optimized Kinesthetic Perception in Scaled Teleoperation
[C/J]
H. I. Son, T. Bhattacharjee, and D. Y. Lee
International Joint Conference on Instrumentation, Control and Information Technology. 2009
H. I. Son, T. Bhattacharjee, and D. Y. Lee
International Joint Conference on Instrumentation, Control and Information Technology. 2009
Analysis of Stability and Performance of Telesurgical Systems
[O]
T. Bhattacharjee
M.S. Thesis. 2009
T. Bhattacharjee
M.S. Thesis. 2009
Haptic Control with Environment Force Estimation for Telesurgery
[C/J]
T. Bhattacharjee, H. I. Son, and D. Y. Lee
International Conference of the IEEE Engineering in Medicine and Biology Society. 2008
T. Bhattacharjee, H. I. Son, and D. Y. Lee
International Conference of the IEEE Engineering in Medicine and Biology Society. 2008