PhyRC Challenge
We are hosting the PhyRC challenge, a competition to facilitate innovation in physical robotic caregiving. The competition has two tracks (Track 1: Fixed-base Manipulation for Robot-assisted Dressing and Track 2: Mobile Manipulation for Robot-assisted Bed Bathing), each evaluated through two phases, namely Phase 1: Simulation Phase and Phase 2: Real Robot Phase. We would like to thank Kinova for generously sponsoring a Gen 3 7-DoF robot arm for the Track 1 winning team and Hello Robot for generously sponsoring a Stretch 3 robot for the Track 2 winning team.
About Physical Robotic Caregiving
A report from 2021 states that over 1 billion people around the world require assistance to carry out daily tasks, and that this number will significantly increase with the aging population. Caregiving robots have the potential to reduce caregivers' workload and increase care recipients' independence. The EmPRISE Lab is hosting the PhyRC (pronounced as fai-R-C) Challenge, which stands for Physical Robotic Caregiving Challenge. With the mission of enabling robots to improve the quality of life of people with mobility limitations by assisting them with activities of daily living (ADLs), we provide realistic setups for robot-assisted dressing and bathing tasks which are important ADLs, with the hope to explore solutions to interesting rigid and deformable object manipulation and physical human-robot interaction problems in physical caregiving settings.
Competition Phases
Simulation Phase (Phase 1) (ended Dec 23, 2024)
We will use RCareWorld as a simulation platform for this phase. The teams can choose which track they want to participate in (they can participate in both tracks as well) and are required to complete at least one of the caregiving tasks in the simulation environment. We will provide the simulation environments including the human avatars, robots, and environmental objects.
Real Robot Phase (Phase 2) (now - May, 2025)
Select teams with the best simulation results will be invited to compete using real-world robots in May 2025 at ICRA 2025 (Atlanta, GA). We do not apply restrictions to the algorithms or robots. We will provide the real-world environment including manikins, beds, wheelchairs etc. The participants will just need to ship their robots to the venue. The participants can use any kinds of sensor as long as they can ship it to the venue and set it up. The participants will have two or three days to practice at the venue and one to two days for competition. We will release a detailed schedule closer to the competition date.
Track 1 (dressing):
- USC SLURM: We are researchers at the University of Southern California's SLURM Lab. Members: Jason Chen; Rajas Chitale; Harshitha Rajaprakash; Daniel Seita
- RALLA: Our team is committed to advancing the capabilities of robot manipulators to assist individuals in their daily lives, particularly for elderly and disabled populations. Members: Jian Zhao; Kefeng Huang
- UNIChAMPions: We are a Brazilian robotics team with graduate students from diverse academics and robotics backgrounds, and with different research interests in the robotics field as simulation, mapping and control. We come from a department with historical projects in the assistive robotics field. Members: César Bastos da Silva; Ervin Alain Bolivar Huayhua; Maria Fernanda Paulino Gomes; Elton Cardoso do Nascimento; Paula Dornhofer Paro Costa; Esther Luna Colombini; Eric Rohmer; Leonardo Rocha Olivi
- UWMTR: We are a passionate team focused on leveraging robotic manipulators to develop innovative solutions for the healthcare sector. Believing in the transformative potential of robotics, we aim to address pressing challenges and drive meaningful change by integrating advanced technology into healthcare practices. Members: Cheng Tang; Hao Tian; Hasan Khan; Siha Pyo; Eddy Zhang; Chao Tang
- EDLAB: We will try our best. Members: Bizhe Bai; JianJian cao; Tao chen; Weinan Zhang
- USC SLURM: We are researchers at the University of Southern California's SLURM Lab. Members: Jason Chen; Rajas Chitale; Harshitha Rajaprakash; Daniel Seita
- RALLA: Our team is committed to advancing the capabilities of robot manipulators to assist individuals in their daily lives, particularly for elderly and disabled populations. Members: Jian Zhao; Kefeng Huang
- RoboNotts: The RoboNotts team, from the University of Nottingham, is a collaborative student team that brings together a variety of skills and disciplines to support personalized health and well-being. Our goal is to develop cutting-edge assistive robotic solutions. As an inter-disciplinary team, we have expertise in robotics, perception, manipulation, and AI. Our development explores innovative models and technologies that meet the challenges of developing ethical, safe, and trustworthy robotic technology solutions. Members: Jialin Chen; Koyo Fujii; Stephen Kalu; Areeb Akhter; Zakaria Taghi; Liz Felton; Luis Figueredo; Praminda Caleb-Solly; Aly Magassouba
- Idiap: A collaborative effort of the Robot Learning and Interaction group and the Human-centered Robotics and AI group at Idiap. Martin Schonger; Sylvain Calinon; Emmanuel Senft
Worldwide User Community
We appreciate people from all over the world signing up for the competition.
Task Details (Realworld details updated!)
Track 1: Fixed-base manipulation for robot-assisted dressing
Assistive dressing is an ADL task during which the caregiver helps the care recipient put on garments. The task setting for the competition considers using a Kinova Gen 3 7-DoF arm to help a human avatar perform the dressing task in Phase 1. For Phase 2, the participants are free to use any robots with a fixed base.
Phase 1 (simulation) participation guide (ended Dec 23, 2024)
A demo of what the task might look like:
Teams will be scored using the following rubric:
- Pick up the garment (5 pts): This task will be considered successful if the hospital gown stays in the robot's hand for 3 seconds when the robot’s hand is lifting the garment in the air.
- Put one wrist in one sleeve (5 pts): The task will be considered successful if at least one of the manikin’s hands is contained within one of the gown sleeves.
- Pull the gown to the other side (5 pts): The task will be considered successful if any part of the gown goes beyond the shoulder joint of the manikin, and the gown stays between the back of the chair and the manikin.
- Dress the other sleeve (5 pts): The task will be considered successful if the manikin’s hand is in the other one of the sleeves.
- Overall dressing (30 pts): (n%)*10+(m%)*20 (n = (length covered by the cloth)/(entire arm length of the first arm), m = same metric for the second arm).
We will also account for the efficiency by dividing the score by the time taken for the entire task. We will randomize the positions of the objects and the human configuration in the environment, and evaluate the proposed solution multiple times with randomized initial states.
Phase 2 (realworld) participation guide
A demo of what the task might look like:
Check the floor plan

We will perform this task with a manikin sitting in a chair. The manikin, Simulaids Flexible Rescue Randy Manikin, has the dimensions detailed in this website. We will provide this manikin and chair at the venue. If you want to set up and practice on your end, you may purchase the same one or use any manikin and chair with similar dimensions.
The garment will be an oversized white short-sleeve t-shirt. We will provide Amazon Essentials Women's Short-Sleeve V-Neck T-Shirt size 2x at the venue. You may purchase the same one or a similar one to practice.
We provide the option to use two arm rests. They provide a good support if you want someting to temporarily hold the manikins arm. If you want to use 3D printed ones, we provide the CAD files and tutorial videos for assembling. For screws and nuts, you can use these ones. If you want to buy off the shelf arm rests, you may purchase this one. We will provide both options at the venue. The arm rests are optionally but we highly recommend using them (they might make things easier).
The details of the task and rubric is as the following:
- Initial state: The robot grasps the t-shirt in its hand. You may grasp any part of the t-shirt. You may place your fix-based robot anywhere around the manikin, but the t-shirt and the manikin should not be in contact. If you choose to use the arm rest, the two hands of the manikin should be on the arm rest. If not, they should hang down naturally.
- Goal state: The manikin is dressed with the t-shirt.
- Rubric:
- Put one wrist in one sleeve (5 pts): The task will be considered success if at least one of the manikin’s hands is contained within one of the sleeves.
- Pull the t-shirt to the other side (3 pts): The task will be considered success if any part of the t-shirt goes beyond the shoulder joint of the manikin.
- Neck dressing (5 pts): The task will be considered success if the neck is in the neck hole, despite the facing of the v-neck.
- Correct facing (3 pts): The task will be considered success if the v-neck is on the front of the body.
- Dress the other sleeve (5 pts): The task will be considered success if the manikin’s hand is in the other one of the sleeves.
- Overall dressing (30 pts): (n%)*10+(m%)*20 (n = (length covered by the cloth)/(entire arm length of the first arm), m = same metric for the second arm). This will be measured manually.
- Time and efficiency of the algorithm: You may run the algorithm multiple times within a certain time (TBD). We will consider the time taken to decide the winner if there is a tie.
Track 2: Mobile manipulation for robot-assisted bed bathing
Bed bathing is an ADL task performed during everyday nursing procedures for people with severe mobility limitations to help them maintain hygiene. The task setting for the competition considers full-body bed bathing, where a manikin is lying on the bed, and the robot needs to bath the front body (excluding the face and private body parts), and the back of forearms. The robot needs to make sure the force is within a certain threshold to make sure the care recipient is safe and comfortable and try to cover as much area as possible.
Phase 1 (simulation) participation guide (ended Dec 23, 2024)
A demo of what the task might look like:
Teams will be scored using the following rubric:
- Pick up the scrubber (5 pts): This task will be considered successful if the scrubber stays in the robot's hand for 3 seconds when the robot’s hand is lifting the scrubber in the air.
- Dip the scrubber in a water tank (5 pts): This task will be considered successful if the scrubber touches the water and the water tank is not knocked over.
- Move the scrubber to the manikin (5 pts): This task will be considered successful if the scrubber is in the hand of the robot, and in contact with any part of the manikin’s body, and the force does not exceed a threshold.
- Perform the full-body bed bathing by sliding the scrubber over the entire body of the manikin (35 pts):
- Body coverage: (n%)*10 (n = area covered with water/entire top body)
- Force threshold: (m%)*25 (m = timestep of forces within the threshold/entire timesteps when the scrubber is in contact with the human)
We will also account for the efficiency by dividing the score by the time taken for the entire task. We will randomize the positions of the objects and the human configuration in the environment, and evaluate the proposed solution with randomized initial state.
Phase 2 (realworld) participation guide
A demo of what the task might look like:
Check the floor plan
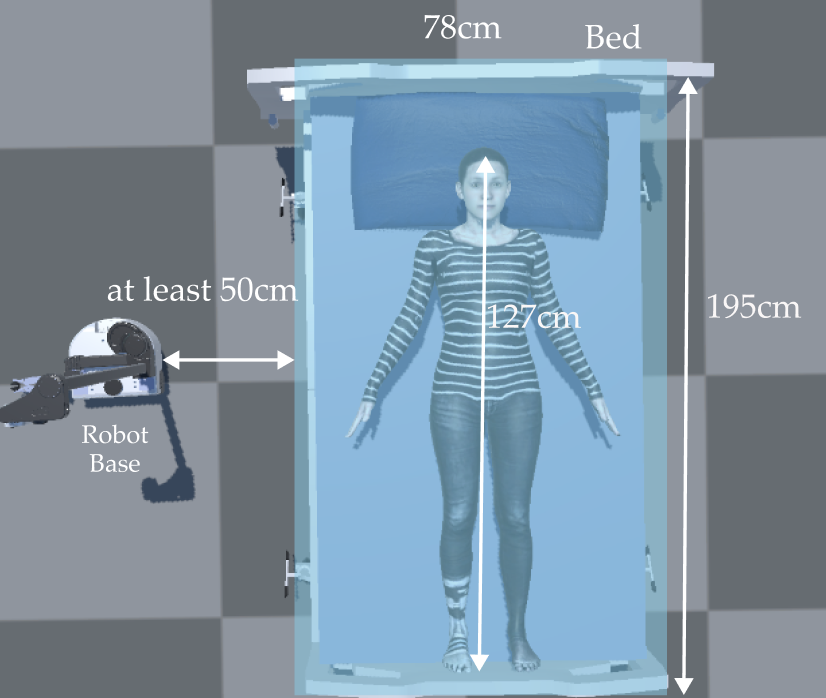
We will perform this task with a manikin lying down in a bed. The manikin, Simulaids Flexible Rescue Randy Manikin, has the dimensions detailed in this website. We will provide this manikin and bed at the venue. If you want to set up and practice on your end, you may purchase the same one or use any manikin and bed with similar dimensions.
We provide the CAD files and an assembly guide here for a bathing tool that the robot can hold in hand to bath the care recipient. The tool has a loadcell force sensor embeded inside, and a sponge at the end. When the sponge is in contact with the manikin, you will be able to get the force. You can apply for free samples here.
The sponge on the bathing tool will be covered with light green paint. We will use this to decide how much area is covered.
- Initial state: The robot grasps the bathing tool. You may grasp any part of the bathing tool. You may place your robot at least 50 cm away from the bed and any part of the robot should not be in contact with the manikin. The sponge is covered with paint.
- Goal state: The manikin's body's visiable part except the face and private parts (will be marked with red tape) are covered with paint. The robot should also try to cover the back of the forearms.
- Rubric:
- Body coverage: (n%)*10 (n = area covered with paint/entire frony body except for the face and private body part). We will take a picture from topdown view and run a segmentation for the paint and calculate the coverage. If the segment result is obviously wrong, we will annotate it manually.
- Force threshold: (m%)*25 (m = timestep of forces within the threshold (TBD)/entire timesteps when the scrubber is in contact with the human). We will provide a script to get data from the force sensor and save the force data.
- Wiping the back of the forearm (10*2): 10 pts for each forearm if the sponge is in contact with the back of the forearm.
- Penalty:
- Touching the private bodyparts or the face: -5 pts for each contact
- Touching the bed sheet: -1 pts for each contact
- Time and efficiency of the algorithm: You may run the algorithm multiple times within a certain time (TBD). We will consider the time taken to decide the winner if there is a tie.
Tentative Schedule (Day-to-day schedule released!)
The schedule is subject to change and will be updated in a timely manner. Join the mailing list using the registration form to get direct notification.
Registration Deadline: Sep 8, 2024 (11:59pm AOE)Phase 1 Announcement: Aug 10, 2024Phase 1: Aug 10 - Dec 23, 2024 (4 months)Phase 2 Announcement: Dec 30, 2024 (Top-n teams released)- Phase 2 Preparation: Feb 2024 - May 2025, Teams prep for real-robot competition (4 months)
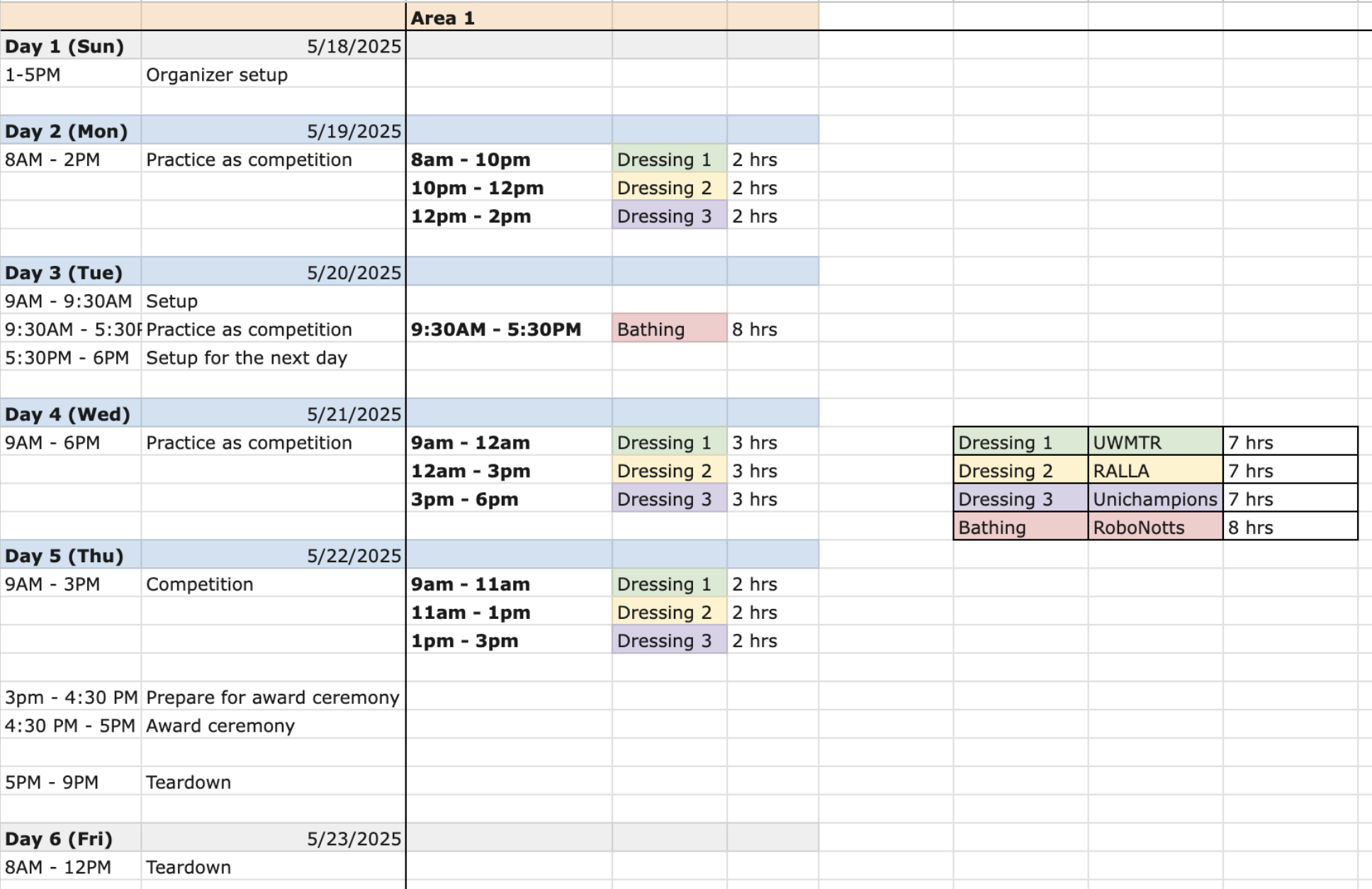
- Phase 2 Final Preparation at Venue: May 2025, Teams practice in competition arena for two to three days (ICRA 2025, Atlanta, GA)
- Phase 2 Competition: Please see the details below. Participants may practice as long as needed, and their performance will be recorded once they are ready. They will have unlimited attempts within a certain time, with only their highest score counted as the final result.
Contact
If you have any questions regarding the competition, please email ry273 at cornell dot edu with PhyRC in the subject line. If you have any questions regarding using RCareWorld, feel free to ask in our discussion forum.
Sponsors
We would like to thank Kinova for generously sponsoring a Gen 3 7-DoF robot arm for the Track 1 winning team and Hello Robot for generously sponsoring a Stretch 3 robot for the Track 2 winning team.

FAQs
- Shipping to conference
- Shipping information is available at: https://www.freemanco.com/store/show/landing?nav=02&showID=533615&review=true You can use other shipping companies, with the shipping lable available from the link. PhyRC is assigned to Booth # C07.
- Are third party libraries allowed?
- Yes, third-party libraries are allowed. Ensure your Docker setup is configured correctly so the environment runs smoothly on the evaluation platform.
- Does the evaluation platform have GPU?
- Yes, the platform supports a single GPU with 12GB of memory.
- If there is a discrepancy between the score that I get locally and the score reported in EvalAI, does that mean there is a bug in the competition code?
- Differences can arise from several factors. We use a set of seeded randomizations for the tasks that are not visible to participants. Make your policy as robust as possible. Additionally, simulation speeds on local computers may differ from the evaluation platform, causing slight score variations. You are allowed multiple submissions per day, and only the highest score will be considered.